铝锂合金具有低的密度、高的比强度、高的比刚度、优良的低温性能、良好的耐腐蚀性能和卓越的超塑性成型性能, 用其取代常规2xxx或7xxx系铝合金, 可使构件质量减轻10%~15%, 刚度提高15%~20%[1 ] . 作为第三代铝锂合金的主要牌号之一, 2099合金由Alcoa公司于1997年研发, 2004年被正式命名为AA 2099[2 ] . 由于具有优异的物理和力学性能, 特别是良好的低各向异性性能[3 ] , 2099合金挤压型材已用于A380客机地板梁, 包括大梁、座椅导轨、驾驶舱等地板构件, 同时也将装机于A350客机地板梁、机身蒙皮和下翼面桁条. 此外, 我国大飞机也拟采用该合金[4 ,5 ] . 与国外相比, 我国在新型铝锂合金的研发上存在明显的滞后性, 目前2099合金的研发仍处于中试阶段.
2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道.
本工作利用热压缩实验获得2099合金不同变形条件下的流变应力数据, 根据半经验公式计算了材料的热激活参数并与纯Al进行对比分析, 结合TEM和EBSD技术来研究2099合金在热变形过程中的动态回复与动态再结晶机制.
1 实验方法
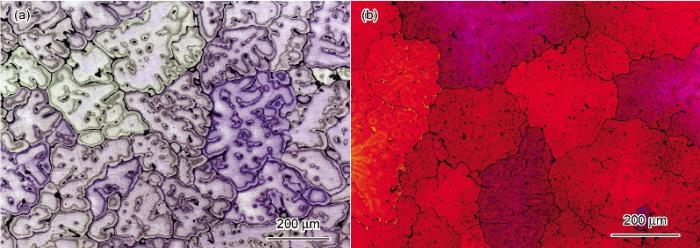
实验材料为2099合金半连续铸锭, 直径540 mm, 长3000 mm, 化学成分(质量分数, %)为: Cu 2.6, Li 1.75, Zn 0.64, Mg 0.29, Mn 0.3, Zr 0.08, Al余量. 均匀化热处理工艺为515 ℃保温18 h和525 ℃保温16 h, 随炉冷却. 图1为2099合金均热前后的金相组织. 可以看出, 铸态合金主要由树枝状α (Al)固溶体与晶界上和枝晶间的低熔点共晶相组成, 晶粒呈等轴状, 晶界附近分布有大量细小第二相, 晶内存在粗大的第二相, 位于晶界上的共晶化合物呈网状连续分布(图1a). 这种网状共晶相塑性低, 脆性大, 由于合金组织具有遗传性, 这种组织不均匀性在后续的加工过程中会极大地影响合金的强韧性, 并增加其各向异性. 由文献[19 ]可知, 该合金采用双级均匀化热处理后, 枝晶偏析基本消除, 非平衡共晶相充分回溶到基体中(图1b), 合金元素在基体内均匀分布, 合金的组织和成分不均匀性得到极大改善.
图1 2099合金均热前后的金相组织
Fig.1 OM images of 2099 alloy as-cast (a) and after homogenization treatment at 515 ℃ for 18 h and 525 ℃ for 16 h (b)
热压缩实验在Gleeble-1500热/力模拟实验机上进行. 变形温度为300~500 ℃, 应变速率为0.001~10 s-1 , 应变量为0.7 (真应变), 利用自身电阻进行加热, 加热速率为10 ℃/s, 变形前保温3 min, 压缩结束时迅速水淬, 以冻结高温变形组织. 压缩试样直径10 mm, 高15 mm, 试样的两端面带有直径9 mm, 深度0.2 mm的凹槽, 槽内填充润滑剂为75%石墨+25%特种高温合成脂(质量分数).
电子背散射衍射(EBSD)组织观察在JSM 7001F型扫描电子显微镜(SEM)上完成. 试样的观测部位选取垂直于压缩轴的易变形区, 制样方法同金相试样类似, 按照标准金相试样制备技术进行研磨和机械抛光, 然后进行电解抛光以消除试样表面应力影响. 抛光液为HClO4 (10 mL)+CH3 CH2 OH (90 mL), 抛光工艺参数为电压25 V, 电流0.2 A, 时间30 s.
采用JEM 2100F型透射电子显微镜(TEM)进行组织观察. 利用线切割在垂直于压缩轴方向中部的易变形区切取厚度为0.6 mm薄片试样, 用金相砂纸将试样研磨至50 μm, 尽可能消除表面划痕, 然后利用金属圆片微型冲片器将研磨好的试样冲制成直径3 mm的圆片, 在MTP-1A型磁力驱动双喷电解减薄器上进行减薄, 电解液为HNO3 (30 mL)+CH3 OH (70 mL), 电解双喷工艺参数为电压10~12 V, 电流50~60 mA, 采用液氮冷却, 电解液温度控制在-20 ℃以下.
2 结果与讨论
2.1 动态回复机制
动态回复机制主要是指在热变形过程中位错的产生、滑移、对消以及重组等速率控制机制. 如螺位错的交滑移、刃位错的攀移、被钉扎位错的脱钉、三维位错网络的脱缠以及螺位错上刃型割阶的非守恒运动等. 研究[20 ,21 ] 表明, 动态回复机制可用材料在热变形过程中的表观激活体积(V)进行表征, 其物理意义是描述位错从平衡位置运动到非平衡位置扫过的面积与Burgers矢量的乘积, 在给定变形温度(T)和应变速率( ε ˙ ) 下, 可估算出材料热变形的表观激活体积:
(1) V = k T [ ∂ l n ε ˙ / ∂ σ ]
式中, k 为Boltzmann常数, σ 为流变应力.
作为表征变形机制中原子重排难易程度相关信息的激活能(Q)同样与动态软化机制有着密切的关系, 由热压缩实验数据可计算出合金的激活能, 如下式所示[22 ] :
(2) Q = R ∂ l n ε ˙ ∂ l n [ s i n h ( α σ ) ] T ∙ ∂ l n [ s i n h ( α σ ) ] ∂ ( 1 / T ) ε ˙
式中, R为气体常数, α =β /n1 为应力水平参数, β 和n1 可分别由式(3)和(4)给出[22 ] :
(3) n 1 = l n ε ˙ / l n σ
(4) β = l n ε ˙ / σ
通常, 不同速率控制机制具有不同的激活能和表观激活体积. 通过计算2099合金在热变形过程中的热激活参数并与纯Al进行对比, 可以推测该合金在热变形时的动态回复机制, 纯Al的几种典型速率控制机制以及相应的激活参数详见文献[23 ].
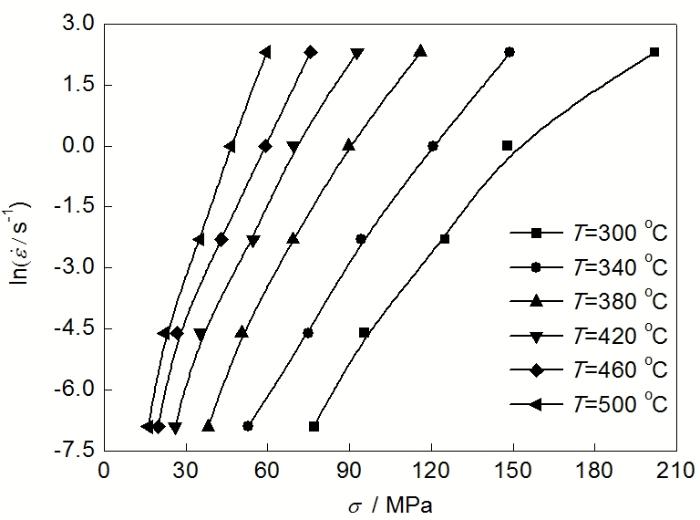
图2为2099合金在不同变形温度下, 应变速率与流变应力的关系曲线. 表观激活体积可采用式(1)进行计算, 结果如表1所示, 取Burgers矢量模b=2.86×10-10 m[23 ] .
图2 2099 合金在不同变形温度条件下流变应力(σ )与应变速率(ε ˙
Fig.2 Curves of flow stress-strain rates of 2099 alloy under different temperatures (T —temperature, σ —stress, ε ˙
研究[24 ] 表明, 温度补偿应变速率, 即Zener-Hollomon参数(Z)在较宽应变速率和温度范围内与实验数据吻合得较好, 如式(5)所示:
(5) Z = ε ˙ e x p Q R T = A [ s i n h ( α σ ) ] n
式中, A为结构因子, n为应变硬化指数.
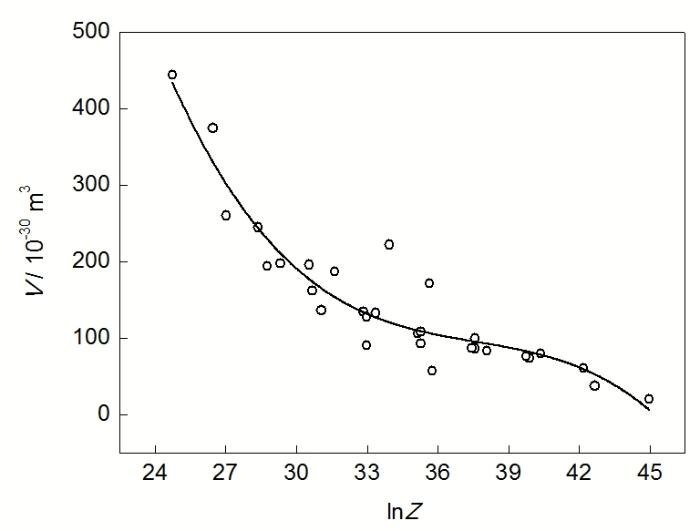
图3为2099合金在不同变形件下, 表观激活体积与温度补偿应变速率之间的关系. 可以看出, 随着lnZ值减小, 表观激活体积显著增加, 说明在高温低应变速率条件下有较大的表观激活体积速率控制机制参与动态软化过程.
图3 2099合金表观激活体积(V)与lnZ之间的拟合曲线
Fig.3 Fit curves of apparent activation volume with lnZ of 2099 alloy
当lnZ≥35.5, T≤380 ℃时, 表观激活体积在20.5×10-30 m3 ~87.5×10-30 m3 范围内变化, 与纯Al交滑移模型所对应的激活参数值较为吻合; 当lnZ≤37.4, T≥340 ℃时, 表观激活体积在91.0×10-30 m3 ~444.7×10-30 m3 范围内变化, 与纯Al在位错攀移、割阶的非守恒运动以及三维位错网的脱缠等速率控制机制时的激活体积大体相当[23 ] .
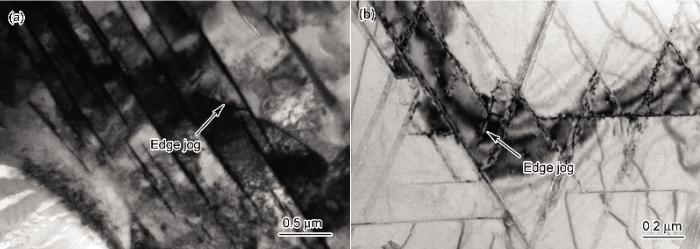
图4a和b分别为lnZ=37.8 (300 ℃, 0.01 s-1 )和lnZ=35.5 (300 ℃, 0.001 s-1 )时2099合金的TEM像. 可以看出, 合金中存在大量的滑移线, 平行分布的滑移线之间可以观察到刃型割阶, 为典型的交滑移特征, 这与热激活体积所对应的动态回复机制相一致.
图4 不同Z值条件下2099合金的TEM像
Fig.4 TEM images of 2099 alloy under lnZ=37.8 (300 ℃, 0.01 s-1 ) (a) and lnZ=35.5 (300 ℃, 0.001 s-1 ) (b)
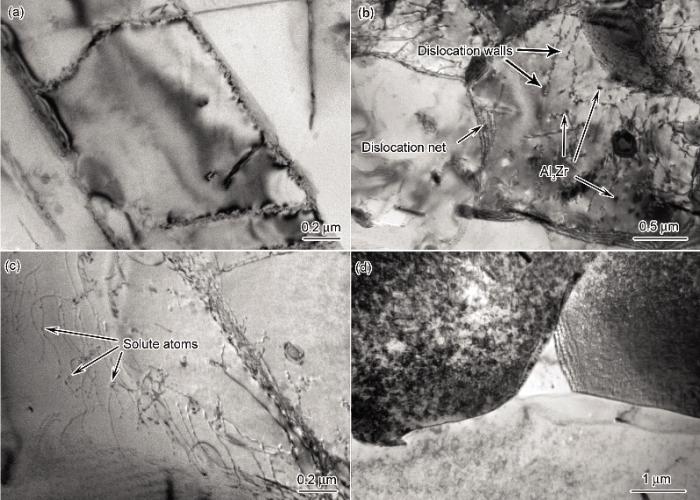
图5为2099合金在不同的温度补偿应变速率下的TEM像. 在热变形过程中, 由于螺位错在交滑移时相互交截而产生大量割阶, 割阶运动时会在其运动轨迹上留下一系列空位, 空位浓度的增加为刃位错的攀移创造了有利的条件. 当lnZ≤37.4 (420 ℃, 10 s-1 )时, 如图5a所示, 合金组织为典型的多边形化亚晶组织, 表明该条件下位错的攀移运动是控制变形的主要机制. 由于位错攀移过程中的热激活区仅为一个Burgers矢量大小, 因而对表观激活体积的贡献较小. 当lnZ=32.8 (420 ℃, 0.1 s-1 )时, 如图5b所示, 亚晶内存在大量的位错壁, 表明位错攀移运动较为活跃. 局部亚晶界由一定宽度且排列规整的位错网络组成. 研究[25 ] 表明, 位错网络相当于扭转型亚晶界, 是由位错缠结中的螺位错经过调整而重新组合而成, 说明该变形条件下位错的交滑移和攀移是控制变形的主要机制. 此外, 还注意到在基体中分布着细小的β ′(Al3 Zr)相粒子, Al3 Zr粒子的存在增大了位错塞积和交截的机会, 使合金中亚晶数量增多的同时能够有效地抑制动态再结晶的发生. 当lnZ=30.9 (460 ℃, 0.1 s-1 )时, 如图5c所示, 亚晶内的位错被溶质原子以及细微粒子所钉扎. DSC测试结果[26 ] 表明, S相(Al2 CuMg)在310 ℃附近发生回溶, S相的回溶将增大合金中Cu和Mg原子的固溶度, 进而增大了溶质原子对位错网络或单根位错的化学拖拽力, 从而促使变形激活能和激活体积增大. 当温度超过400 ℃, δ 相(AlLi), T相(Al2 MgLi) 和少量的T2 相(Al6 CuLi3 )会发生回溶, S相的固溶度也进一步增大[26 ] , Li和Mg等溶质原子对位错的阻碍作用更为明显, 变形激活能和激活体积又一次急剧增加. 此外, 借助外力和热激活作用, 位于亚晶界上连接较为薄弱的位错网中的可动位错挣脱束缚而继续运动, 三维位错网脱缠所对应的高激活能和高激活体积对2099合金热激活参数产生一定影响. 当lnZ=24.5 (500 ℃, 0.001 s-1 )时, 如图5d所示, 合金组织呈现典型的再结晶特征, 晶界明锐平直, 有进一步长大的趋势, 说明该条件下已发生了动态再结晶, 与之相对应的热激活能也有所降低.
图5 不同Z值条件下2099合金的TEM像
Fig.5 TEM images of 2099 alloy under lnZ=37.4 (420 ℃, 10 s-1 ) (a), lnZ=32.8 (420 ℃, 0.1 s-1 ) (b), lnZ=30.9 (460 ℃, 0.1 s-1 ) (c) and lnZ=24.5 (500 ℃, 0.001 s-1 ) (d)
采用TEM研究材料的亚结构特征, 很难得到大量的统计信息, 因此不能全面把握和分析合金在热变形过程中的组织演变规律, 尤其对于再结晶比例很小的部分动态再结晶组织. EBSD可以选取较大的视场范围, 可较为全面地统计和分析合金在热加工变形过程中的详细信息.
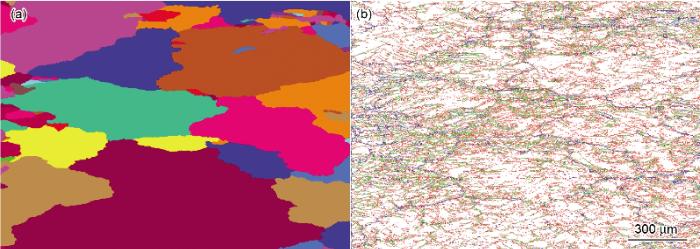
图6为lnZ=35.5 (300 ℃, 0.001 s-1 )时2099合金的EBSD图. 图6a为取向成像图, 合金组织以亚晶结构为主, 晶粒被不同程度的压扁. 图6b为晶界重构图, 取向差<15°(绿色和红色)的小角度晶界体积分数达86.8%, 取向差≥15°(蓝色)的大角度晶界体积分数为13.2%, 越靠近晶界取向差接近15°的小角度晶界所占比例越大, 该变形条件下合金的动态软化方式以动态回复为主.
图6 lnZ=35.5 (300 ℃, 0.001 s-1 )时2099合金的EBSD图
Fig.6 Fig.6 EBSD maps of 2099 alloy when lnZ=35.5 (300 ℃, 0.001 s-1 )(a) orientation image map(b) grain boundary reconstruction map
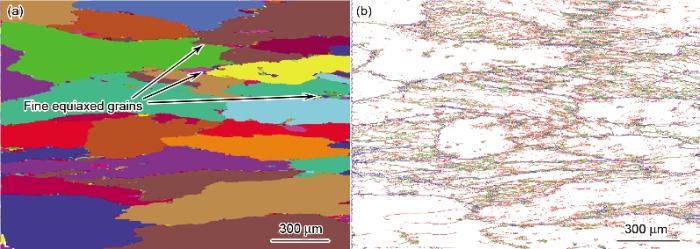
图7为lnZ=35.1 (420 ℃, 1 s-1 )时2099合金的EBSD图. 可以发现, 合金组织仍以亚晶结构为主, 但在原始晶界附近出现了细小等轴晶, 如图7a所示. 由晶界重构图(图7b)可知, 晶界附近的细小等轴晶的取向差≥15°, 即为新生的大角度晶粒, 说明该变形条件下发生了动态再结晶.
图7 lnZ=35.1 (420 ℃, 1 s-1 )时2099合金的EBSD图
Fig.7 Fig.7 EBSD maps of 2099 alloy when lnZ=35.1 (420 ℃, 1 s-1 )(a) orientation image map(b) grain boundary reconstruction map
由以上分析可知, 2099合金在热压缩过程中的动态回复机制为: 在lnZ≥35.5, T≤380 ℃范围内时, 以螺位错的交滑移为主要变形机制; 在lnZ≤37.4, T≥340 ℃范围内时, 以位错的交滑移和攀移以及三维位错网脱缠等变形机制共同控制; 在lnZ≤35.1, T≥420 ℃范围内时, 以位错的交滑移、攀移、动态再结晶以及位错的脱钉为主要软化机制.
2.2 动态再结晶机制
再结晶是显微组织彻底重新改组的过程, 在性能方面也是发生了根本性的变化. 通过了解和掌握形核机制, 为再结晶组织的预测和控制提供依据, 反过来也可用于加工工艺的选取和优化.
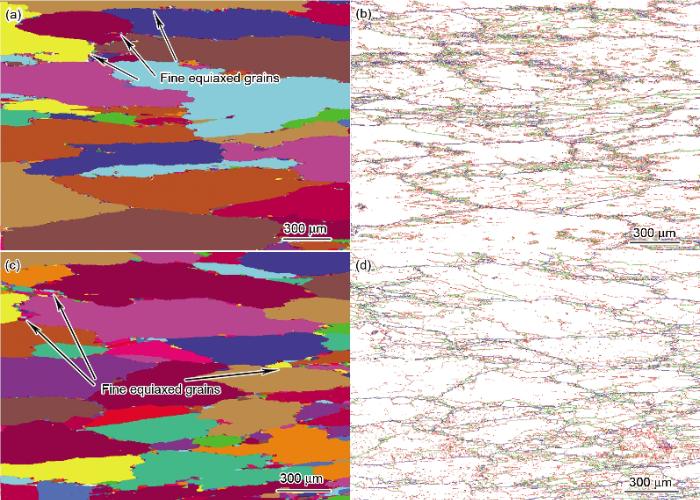
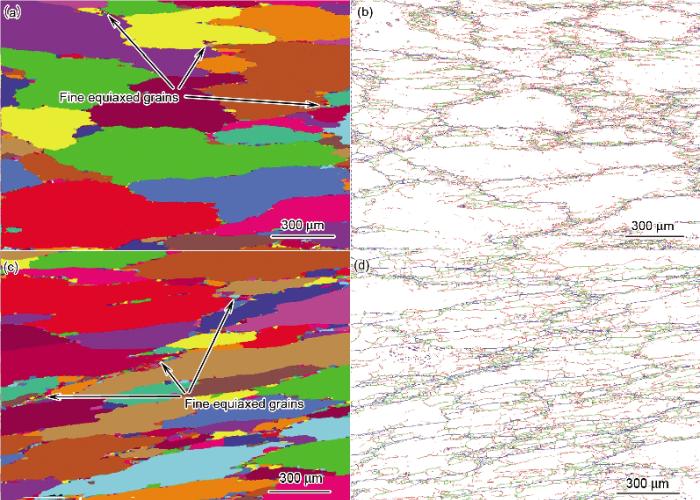
图8为应变速率为0.1 s-1 , 变形温度分别为420和500 ℃, 应变量为0.7条件下2099合金的取向成像图和晶界重构图. 取向成像图的详细信息可通过晶界重构图反映出来, 图中蓝色线条代表取向差≥15°的大角度晶界, 红色和绿色线条分别代表取向差2°~5°和5°~15°的小角度晶界. 变形温度为420 ℃时, 晶界附近出现了一些细小的晶粒, 特别是在某些畸变程度较大的晶界附近这些小晶粒的分布较为密集, 如图8a所示. 由图8b可知, 这些细小的晶粒主要是由晶界弓出形核以及亚晶的倾转而形成的大角度等轴晶和一些细小的小角度亚晶组成. 此外, 在变形晶粒的内部也观察到一些小角度亚晶和大角度等轴晶, 说明该变形条件下的形核机制以晶界弓出形核为主, 同时亚晶合并形核也发挥重要作用. 变形温度升高到500 ℃时, 如图8c和d所示, 细小等轴晶都明显长大, 这主要归因于热激活作用的增强所致. 位于晶界附近的细小晶粒数目变化不大, 而位于变形晶粒内部的大角度等轴晶有所增加, 说明该变形条件下亚晶合并形核机制得到强化.
图8 应变速率为0.1 s-1 时2099合金的EBSD图
Fig.8 Orientation image (a, c) and grain boundary reconstruction (b, d) maps of 2099 alloy at 420 ℃ (a, b) and 500 ℃ (c, d) with strain rate of 0.1 s-1
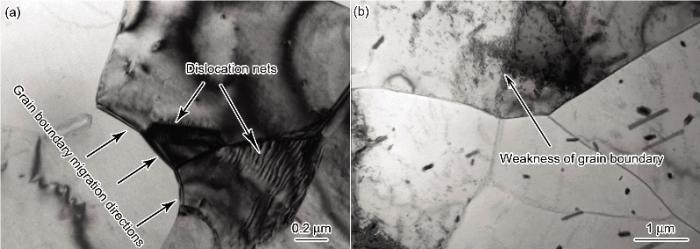
图9为应变速率为0.1 s-1 , 变形温度分别为420和500 ℃, 应变量为0.7条件下2099合金的TEM像. 变形温度为420 ℃时, 如图9a所示, 右下方较小黑色亚晶内分布着平行排列的位错网, 左边较大的灰白色晶粒内没有发现位错, 晶界以弓出的方式向右边畸变能较大的亚晶推进. 中下部2个较小的亚晶被周围较大的晶粒包围, 最终通过亚晶倾转进行合并和长大. 变形温度升高到500 ℃时, 如图9b所示, 亚晶界平直延展, 部分晶界逐渐弱化, 并通过位错脱缠和拆散而逐步消失, 此时再结晶形核主要通过亚晶合并实现.
图9 应变速率为0.1 s-1 时2099合金的TEM像
Fig.9 TEM images of 2099 alloy at 420 ℃ (a) and 500 ℃ (b) with strain rate of 0.1 s-1
图10为应变速率在0.001 s-1 , 变形温度分别为420和500 ℃, 应变量为0.7条件下2099合金的取向成像图和晶界重构图. 变形温度为420 ℃时, 如图10a和b所示, 晶界附近出现了一些细小的晶粒, 主要由大角度等轴晶和小角度亚晶组成, 在变形晶粒内部可以观察到较为丰富的亚晶组织并有进一步转化为大角度晶粒的趋势, 说明该变形条件的动态再结晶形核机制仍以晶界弓出形核为主, 亚晶合并形核次之. 变形温度升高到500 ℃时, 如图10c和d所示, 合金基体中的细小晶粒体积分数明显增大, 晶界上的细小等轴晶明显增多, 局部晶界呈项链状聚集在一起. 此外, 从图10d可以发现, 原始晶粒内部的亚结构非常发达, 特别是取向差在5°~15°范围内, 这些中等角度的亚晶界比例明显增加, 说明该变形条件下亚晶合并形核方式开始增强, 而晶界弓出形核机制仍发挥重要作用.
图10 应变速率为0.001 s-1 时2099合金的EBSD图
Fig.10 Orientation image (a, c) and grain boundary reconstruction (b, d) maps of 2099 alloy at 420 ℃ (a, b) and 500 ℃ (c, d) with strain rate of 0.001 s-1
图11为应变速率为0.001 s-1 , 变形温度分别为420, 460和500 ℃, 应变量为0.7条件下2099合金的TEM像. 变形温度为420 ℃时, 如图11a所示, 右上方亚晶以晶界弓出的方式向右下方畸变能较大的亚晶推进, 由于畸变程度的不均匀性, 导致晶界呈锯齿状. 变形温度升高到460 ℃时, 如图11b所示, 合金已发生了动态再结晶, 晶内位错密度很低, 左右上方晶粒间的晶界有平直化的趋势, 以使界面能达到最低. 变形温度达到500 ℃时, 如图11c所示, 左上方和下方2个较大的再结晶晶粒有沿着曲率相反方向长大的趋势, 右边3个晶界较为规整的亚晶可通过亚晶合并的方式长大.
图11 应变速率为0.001 s-1 时2099合金的TEM像
Fig.11 TEM images of 2099 alloy at 420 ℃ (a), 460 ℃ (b) and 500 ℃ (c) with strain rate of 0.001 s-1
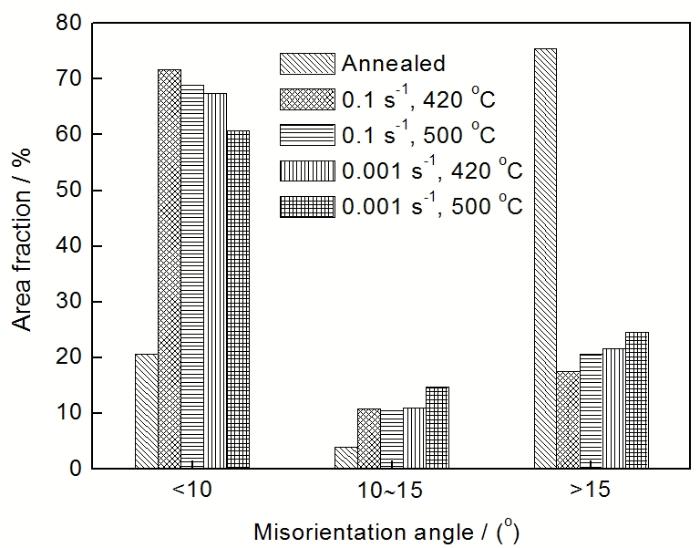
图12为不同变形条件下2099合金组织的取向差统计分布图. 可以看出, 变形前后晶体结构的取向差比例变化非常明显, 变形前合金组织主要由大角度等轴晶构成, 变形后基体组织以亚晶结构为主. 随着应变速率的降低和变形温度的升高, 小于10°的小角度亚晶逐步向10°~15°的中等角度亚晶和大于15°的大角度晶粒转化. 当应变速率为0.1 s-1 时, 变形温度从420 ℃上升到500 ℃, 小于10°的小角度亚晶比例降低, 而10°~15°范围内的亚晶比例几乎保持不变, 说明该变形条件范围内动态再结晶形核机制以晶界弓出形核为主, 亚晶合并形核次之. 当应变速率为0.001 s-1 时, 小于10°的小角度亚晶所占比例降低, 而10°~15°范围内的亚晶比例增加. 研究[27 ] 表明, 当亚晶间取向差在10°~15°范围内时, 动态再结晶更容易通过亚晶合并形核机制发生, 表明在该变形条件范围内亚晶合并形核机制得到强化, 这与利用EBSD和TEM技术分析所得到的结果一致.
图12 不同变形条件下2099 合金组织的取向差分布统计图
Fig.12 Statistical graph of misorientation distribution under different deformation conditions for 2099 alloy
综上所述, 动态再结晶的形核机制以晶界弓出与亚晶合并共存, 随着温度的升高和应变速率的降低, 亚晶合并形核得到强化.
3 结论
(1) 依据Zener-Hollomon参数(Z)和变形温度(T)并结合对热激活参数与微观组织的分析, 将2099合金的动态回复机制划分为: 在lnZ≥35.5, T≤380 ℃范围内, 以螺型位错的交滑移为主要变形机制; 在lnZ≤37.4, T≥340 ℃范围内, 由位错的交滑移、攀移以及三维位错网脱缠等变形机制共同控制.
(2) 在lnZ≤35.1, T≥420 ℃范围内, 合金发生了动态再结晶. 该变形条件下的软化机制以位错的交滑移、攀移、动态再结晶以及位错的脱钉为主.
(3) 2099合金动态再结晶形核机制在变形温度为420~500 ℃, 应变速率为0.001~10 s-1 范围内时, 以晶界弓出和亚晶合并共同发挥作用, 且随着温度的升高和应变速率的降低亚晶合并形核机制得到强化.
参考文献
文献选项
[1]
Jabra J Romios M Lai J Lee E Setiawan M Lee E W Witters J Abourialy N Ogren J R Oppenheim T Frazier W E Es-Said O S J Mater Eng Perform , 2006 ; 15 : 601
[本文引用: 1]
[2]
Ma Y Zhou X Thompson G E Hashimoto T Thomson P Fowles M Mater Chem Phys , 2011 ; 126 : 46
[本文引用: 1]
[3]
Romios M Tiraschi R Parrish C Babel H W Ogren J R Es-Said O S J Mater Eng Perform , 2005 ; 14 : 641
[本文引用: 1]
[4]
Ward N Tran A Abad A Lee E W Hahn M Fordan E Es-Said O S J Mater Eng Perform , 2011 ; 20 : 989
[本文引用: 1]
[5]
Wei X Y Zheng Z Q She L J Chen Q N Li S C Rare Met Mater Eng , 2010 ; 39 : 1583
[本文引用: 1]
(魏修宇 , 郑子樵 , 佘玲娟 , 陈秋妮 , 李世晨 . 稀有金属材料与工程 , 2010 ; 39 : 1583 )
[本文引用: 1]
[6]
Gourdet S Montheillet F Mater Sci Eng , 2000 ; A283 : 274
[本文引用: 1]
[7]
Tajally M Huda Z Masjuki H H Met Sci Heat Treat , 2011 ; 53 : 165
[本文引用: 1]
[8]
Hu H E Zhen L Zhang B Y Yang L Chen J Z Mater Charact , 2008 ; 59 : 1185
[本文引用: 1]
[9]
Faivre P Doherty R D J Mater Sci , 1979 ; 14 : 897
[本文引用: 1]
[10]
Wan J L Sun X J Gu J L Chen N P Acta Metall Sin , 1999 ; 35 :1031
[本文引用: 1]
(万菊林 , 孙新军 , 顾家琳 , 陈南平 . 金属学报 , 1999 ; 35 : 1031 )
[本文引用: 1]
[11]
Xu X J Wang B Wu G C Zhang F B Song T Luo Y Cheng X N Rare Met Mater Eng , 2011 ; 40 (Suppl 2 ): 248
[本文引用: 1]
(许晓静 , 王 彬 , 吴桂潮 , 张福豹 , 宋 涛 , 罗 勇 , 程晓农 . 稀有金属材料与工程 , 2011 ; 40 (增刊2 ): 248 )
[本文引用: 1]
[12]
Song T Xu X J Fan Z Luo Y Wang B Wu G C Zhang Z Q Zhang Y K Rare Met Mater Eng , 2012 ; 41 (Suppl 2 ): 374
[本文引用: 1]
(宋 涛 , 许晓静 , 范 真 , 罗 勇 , 王 彬 , 吴桂潮 , 张振强 , 张允康 . 稀有金属材料与工程 , 2012 ; 41 (增刊2 ): 374 )
[本文引用: 1]
[13]
Zhu X H Zheng Z Q Zhong S Chin J Nonferrous Met , 2010 ; 20 : 1861
[本文引用: 1]
(朱小辉 , 郑之樵 , 钟 申 . 中国有色金属学报 , 2010 ; 20 : 1861 )
[本文引用: 1]
[14]
Fragomeni J Wheeler R Jata K V J Mater Eng Perform , 2005 ; 14 : 18
[本文引用: 1]
[15]
Song T Xu X J Fan Z Zhang Z Q Wang B Luo Y Chin J Rare Met , 2012 ; 36 : 196
[本文引用: 1]
(宋 涛 , 许晓静 , 范 真 , 张振强 , 王 彬 , 罗 勇 . 稀有金属 , 2012 ; 36 : 196 )
[本文引用: 1]
[16]
Kertz J E Gouma P I Buchheit R G Metall Mater Trans , 2001 ; 32A : 2561
[本文引用: 1]
[17]
Csontos A A Starke E A Metall Mater Trans , 2000 ; 31A : 1965
[本文引用: 1]
[18]
Odeshi A G Adesola A O Badmos A Y Eng Fail Anal , 2013 ; 35 : 302
[本文引用: 1]
[19]
Zhang F Shen J Yan X D Sun J L Sun X L Yang Y Rare Met , 2014 ; 33 : 28
[本文引用: 1]
[20]
Shen J Chin J Nonferrous Met , 2001 ; 11 : 593
[本文引用: 1]
(沈 健 . 中国有色金属学报 , 2001 ; 11 : 593 )
[本文引用: 1]
[21]
Rao K P Prasad Y V R K . J Mech Work Technol , 1986 ; 13 : 83
[本文引用: 1]
[22]
Li W Li H Wang Z X Zheng Z Q Mater Sci Eng , 2011 ; A528 : 4101
[本文引用: 2]
[23]
Li J C M . J Appl Phys , 1962 ; 33 : 2965
[本文引用: 3]
[24]
Samantaray D Mandal S Bhaduri A K Mater Des , 2010 ; 31 : 982
[本文引用: 1]
[25]
Song W X Metallography. 2nd Ed. , Beijing: Metallurgical Industry Press , 2010 : 189
[本文引用: 1]
(宋维锡 . 金属学 . 第二版, 北京 : 冶金工业出版社 , 2010 : 189 )
[本文引用: 1]
[26]
Shen J PhD Dissertation, Central South University of Technology, Changsha , 1996
[本文引用: 2]
(沈 健 . 中南工业大学博士学位论文, 长沙 , 1996 )
[本文引用: 2]
[27]
Wang Y Shao W Z Zhen L Zhang X M Mater Sci Eng , 2008 ; A486 : 321
[本文引用: 1]
1
2006
... 铝锂合金具有低的密度、高的比强度、高的比刚度、优良的低温性能、良好的耐腐蚀性能和卓越的超塑性成型性能, 用其取代常规2xxx或7xxx系铝合金, 可使构件质量减轻10%~15%, 刚度提高15%~20%[1 ] . 作为第三代铝锂合金的主要牌号之一, 2099合金由Alcoa公司于1997年研发, 2004年被正式命名为AA 2099[2 ] . 由于具有优异的物理和力学性能, 特别是良好的低各向异性性能[3 ] , 2099合金挤压型材已用于A380客机地板梁, 包括大梁、座椅导轨、驾驶舱等地板构件, 同时也将装机于A350客机地板梁、机身蒙皮和下翼面桁条. 此外, 我国大飞机也拟采用该合金[4 ,5 ] . 与国外相比, 我国在新型铝锂合金的研发上存在明显的滞后性, 目前2099合金的研发仍处于中试阶段. ...
1
2011
... 铝锂合金具有低的密度、高的比强度、高的比刚度、优良的低温性能、良好的耐腐蚀性能和卓越的超塑性成型性能, 用其取代常规2xxx或7xxx系铝合金, 可使构件质量减轻10%~15%, 刚度提高15%~20%[1 ] . 作为第三代铝锂合金的主要牌号之一, 2099合金由Alcoa公司于1997年研发, 2004年被正式命名为AA 2099[2 ] . 由于具有优异的物理和力学性能, 特别是良好的低各向异性性能[3 ] , 2099合金挤压型材已用于A380客机地板梁, 包括大梁、座椅导轨、驾驶舱等地板构件, 同时也将装机于A350客机地板梁、机身蒙皮和下翼面桁条. 此外, 我国大飞机也拟采用该合金[4 ,5 ] . 与国外相比, 我国在新型铝锂合金的研发上存在明显的滞后性, 目前2099合金的研发仍处于中试阶段. ...
1
2005
... 铝锂合金具有低的密度、高的比强度、高的比刚度、优良的低温性能、良好的耐腐蚀性能和卓越的超塑性成型性能, 用其取代常规2xxx或7xxx系铝合金, 可使构件质量减轻10%~15%, 刚度提高15%~20%[1 ] . 作为第三代铝锂合金的主要牌号之一, 2099合金由Alcoa公司于1997年研发, 2004年被正式命名为AA 2099[2 ] . 由于具有优异的物理和力学性能, 特别是良好的低各向异性性能[3 ] , 2099合金挤压型材已用于A380客机地板梁, 包括大梁、座椅导轨、驾驶舱等地板构件, 同时也将装机于A350客机地板梁、机身蒙皮和下翼面桁条. 此外, 我国大飞机也拟采用该合金[4 ,5 ] . 与国外相比, 我国在新型铝锂合金的研发上存在明显的滞后性, 目前2099合金的研发仍处于中试阶段. ...
1
2011
... 铝锂合金具有低的密度、高的比强度、高的比刚度、优良的低温性能、良好的耐腐蚀性能和卓越的超塑性成型性能, 用其取代常规2xxx或7xxx系铝合金, 可使构件质量减轻10%~15%, 刚度提高15%~20%[1 ] . 作为第三代铝锂合金的主要牌号之一, 2099合金由Alcoa公司于1997年研发, 2004年被正式命名为AA 2099[2 ] . 由于具有优异的物理和力学性能, 特别是良好的低各向异性性能[3 ] , 2099合金挤压型材已用于A380客机地板梁, 包括大梁、座椅导轨、驾驶舱等地板构件, 同时也将装机于A350客机地板梁、机身蒙皮和下翼面桁条. 此外, 我国大飞机也拟采用该合金[4 ,5 ] . 与国外相比, 我国在新型铝锂合金的研发上存在明显的滞后性, 目前2099合金的研发仍处于中试阶段. ...
1
2010
... 铝锂合金具有低的密度、高的比强度、高的比刚度、优良的低温性能、良好的耐腐蚀性能和卓越的超塑性成型性能, 用其取代常规2xxx或7xxx系铝合金, 可使构件质量减轻10%~15%, 刚度提高15%~20%[1 ] . 作为第三代铝锂合金的主要牌号之一, 2099合金由Alcoa公司于1997年研发, 2004年被正式命名为AA 2099[2 ] . 由于具有优异的物理和力学性能, 特别是良好的低各向异性性能[3 ] , 2099合金挤压型材已用于A380客机地板梁, 包括大梁、座椅导轨、驾驶舱等地板构件, 同时也将装机于A350客机地板梁、机身蒙皮和下翼面桁条. 此外, 我国大飞机也拟采用该合金[4 ,5 ] . 与国外相比, 我国在新型铝锂合金的研发上存在明显的滞后性, 目前2099合金的研发仍处于中试阶段. ...
1
2010
... 铝锂合金具有低的密度、高的比强度、高的比刚度、优良的低温性能、良好的耐腐蚀性能和卓越的超塑性成型性能, 用其取代常规2xxx或7xxx系铝合金, 可使构件质量减轻10%~15%, 刚度提高15%~20%[1 ] . 作为第三代铝锂合金的主要牌号之一, 2099合金由Alcoa公司于1997年研发, 2004年被正式命名为AA 2099[2 ] . 由于具有优异的物理和力学性能, 特别是良好的低各向异性性能[3 ] , 2099合金挤压型材已用于A380客机地板梁, 包括大梁、座椅导轨、驾驶舱等地板构件, 同时也将装机于A350客机地板梁、机身蒙皮和下翼面桁条. 此外, 我国大飞机也拟采用该合金[4 ,5 ] . 与国外相比, 我国在新型铝锂合金的研发上存在明显的滞后性, 目前2099合金的研发仍处于中试阶段. ...
1
2000
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2011
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2008
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
1979
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
1999
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
1999
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2011
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2011
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2012
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2012
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2010
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2010
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2005
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2012
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2012
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2001
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2000
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2013
... 2099合金的优异性能在很大程度上取决于热加工过程中对工艺制度的严格控制, 而该合金的组织演化对于成形条件极为敏感, 且难以控制. 因此, 揭示该合金在不同变形条件下的动态软化机制也是实现对最终制品的组织控制所需解决的关键问题. 对于铝合金的动态软化机制方面的研究已有不少报道, Gourdet和Montheillet[6 ] 通过实验研究了Al在热变形过程中的动态再结晶机制; Tajally等[7 ] 探讨了再结晶条件对7075合金力学性能的影响; Hu等[8 ] 研究了7050合金在动态软化过程中的显微组织特征, 认为位错滑移对连续动态再结晶发挥作用; Faivre和Doherty[9 ] 讨论了Al在压缩过程中的再结晶形核; 万菊林等[10 ] 研究了铝合金连续扭转变形中连续动态再结晶机理, 发现连续动态再结晶是该材料在高温慢速预变形中晶粒细化的主要机制. 然而, 目前对2099合金的研究主要集中在微合金化[11 ] 、固溶处理[12 ] 、时效工艺[13 ,14 ] 、耐热耐蚀[15 ,16 ] 以及疲劳断裂[17 , 18 ] 等方面, 而有关2099合金在热变形过程中的动态软化机制却鲜有详细的报道. ...
1
2014
... 实验材料为2099合金半连续铸锭, 直径540 mm, 长3000 mm, 化学成分(质量分数, %)为: Cu 2.6, Li 1.75, Zn 0.64, Mg 0.29, Mn 0.3, Zr 0.08, Al余量. 均匀化热处理工艺为515 ℃保温18 h和525 ℃保温16 h, 随炉冷却. 图1为2099合金均热前后的金相组织. 可以看出, 铸态合金主要由树枝状α (Al)固溶体与晶界上和枝晶间的低熔点共晶相组成, 晶粒呈等轴状, 晶界附近分布有大量细小第二相, 晶内存在粗大的第二相, 位于晶界上的共晶化合物呈网状连续分布(图1a). 这种网状共晶相塑性低, 脆性大, 由于合金组织具有遗传性, 这种组织不均匀性在后续的加工过程中会极大地影响合金的强韧性, 并增加其各向异性. 由文献[19 ]可知, 该合金采用双级均匀化热处理后, 枝晶偏析基本消除, 非平衡共晶相充分回溶到基体中(图1b), 合金元素在基体内均匀分布, 合金的组织和成分不均匀性得到极大改善. ...
1
2001
... 动态回复机制主要是指在热变形过程中位错的产生、滑移、对消以及重组等速率控制机制. 如螺位错的交滑移、刃位错的攀移、被钉扎位错的脱钉、三维位错网络的脱缠以及螺位错上刃型割阶的非守恒运动等. 研究[20 ,21 ] 表明, 动态回复机制可用材料在热变形过程中的表观激活体积(V)进行表征, 其物理意义是描述位错从平衡位置运动到非平衡位置扫过的面积与Burgers矢量的乘积, 在给定变形温度(T)和应变速率( ε ˙ ) 下, 可估算出材料热变形的表观激活体积: ...
1
2001
... 动态回复机制主要是指在热变形过程中位错的产生、滑移、对消以及重组等速率控制机制. 如螺位错的交滑移、刃位错的攀移、被钉扎位错的脱钉、三维位错网络的脱缠以及螺位错上刃型割阶的非守恒运动等. 研究[20 ,21 ] 表明, 动态回复机制可用材料在热变形过程中的表观激活体积(V)进行表征, 其物理意义是描述位错从平衡位置运动到非平衡位置扫过的面积与Burgers矢量的乘积, 在给定变形温度(T)和应变速率( ε ˙ ) 下, 可估算出材料热变形的表观激活体积: ...
1
1986
... 动态回复机制主要是指在热变形过程中位错的产生、滑移、对消以及重组等速率控制机制. 如螺位错的交滑移、刃位错的攀移、被钉扎位错的脱钉、三维位错网络的脱缠以及螺位错上刃型割阶的非守恒运动等. 研究[20 ,21 ] 表明, 动态回复机制可用材料在热变形过程中的表观激活体积(V)进行表征, 其物理意义是描述位错从平衡位置运动到非平衡位置扫过的面积与Burgers矢量的乘积, 在给定变形温度(T)和应变速率( ε ˙ ) 下, 可估算出材料热变形的表观激活体积: ...
2
2011
... 作为表征变形机制中原子重排难易程度相关信息的激活能(Q)同样与动态软化机制有着密切的关系, 由热压缩实验数据可计算出合金的激活能, 如下式所示[22 ] : ...
... 式中, R为气体常数, α =β /n1 为应力水平参数, β 和n1 可分别由式(3)和(4)给出[22 ] : ...
3
1962
... 通常, 不同速率控制机制具有不同的激活能和表观激活体积. 通过计算2099合金在热变形过程中的热激活参数并与纯Al进行对比, 可以推测该合金在热变形时的动态回复机制, 纯Al的几种典型速率控制机制以及相应的激活参数详见文献[23 ]. ...
... 图2为2099合金在不同变形温度下, 应变速率与流变应力的关系曲线. 表观激活体积可采用式(1)进行计算, 结果如表1所示, 取Burgers矢量模b=2.86×10-10 m[23 ] . ...
... 当lnZ≥35.5, T≤380 ℃时, 表观激活体积在20.5×10-30 m3 ~87.5×10-30 m3 范围内变化, 与纯Al交滑移模型所对应的激活参数值较为吻合; 当lnZ≤37.4, T≥340 ℃时, 表观激活体积在91.0×10-30 m3 ~444.7×10-30 m3 范围内变化, 与纯Al在位错攀移、割阶的非守恒运动以及三维位错网的脱缠等速率控制机制时的激活体积大体相当[23 ] . ...
1
2010
... 研究[24 ] 表明, 温度补偿应变速率, 即Zener-Hollomon参数(Z)在较宽应变速率和温度范围内与实验数据吻合得较好, 如式(5)所示: ...
1
2010
... 图5为2099合金在不同的温度补偿应变速率下的TEM像. 在热变形过程中, 由于螺位错在交滑移时相互交截而产生大量割阶, 割阶运动时会在其运动轨迹上留下一系列空位, 空位浓度的增加为刃位错的攀移创造了有利的条件. 当lnZ≤37.4 (420 ℃, 10 s-1 )时, 如图5a所示, 合金组织为典型的多边形化亚晶组织, 表明该条件下位错的攀移运动是控制变形的主要机制. 由于位错攀移过程中的热激活区仅为一个Burgers矢量大小, 因而对表观激活体积的贡献较小. 当lnZ=32.8 (420 ℃, 0.1 s-1 )时, 如图5b所示, 亚晶内存在大量的位错壁, 表明位错攀移运动较为活跃. 局部亚晶界由一定宽度且排列规整的位错网络组成. 研究[25 ] 表明, 位错网络相当于扭转型亚晶界, 是由位错缠结中的螺位错经过调整而重新组合而成, 说明该变形条件下位错的交滑移和攀移是控制变形的主要机制. 此外, 还注意到在基体中分布着细小的β ′(Al3 Zr)相粒子, Al3 Zr粒子的存在增大了位错塞积和交截的机会, 使合金中亚晶数量增多的同时能够有效地抑制动态再结晶的发生. 当lnZ=30.9 (460 ℃, 0.1 s-1 )时, 如图5c所示, 亚晶内的位错被溶质原子以及细微粒子所钉扎. DSC测试结果[26 ] 表明, S相(Al2 CuMg)在310 ℃附近发生回溶, S相的回溶将增大合金中Cu和Mg原子的固溶度, 进而增大了溶质原子对位错网络或单根位错的化学拖拽力, 从而促使变形激活能和激活体积增大. 当温度超过400 ℃, δ 相(AlLi), T相(Al2 MgLi) 和少量的T2 相(Al6 CuLi3 )会发生回溶, S相的固溶度也进一步增大[26 ] , Li和Mg等溶质原子对位错的阻碍作用更为明显, 变形激活能和激活体积又一次急剧增加. 此外, 借助外力和热激活作用, 位于亚晶界上连接较为薄弱的位错网中的可动位错挣脱束缚而继续运动, 三维位错网脱缠所对应的高激活能和高激活体积对2099合金热激活参数产生一定影响. 当lnZ=24.5 (500 ℃, 0.001 s-1 )时, 如图5d所示, 合金组织呈现典型的再结晶特征, 晶界明锐平直, 有进一步长大的趋势, 说明该条件下已发生了动态再结晶, 与之相对应的热激活能也有所降低. ...
1
2010
... 图5为2099合金在不同的温度补偿应变速率下的TEM像. 在热变形过程中, 由于螺位错在交滑移时相互交截而产生大量割阶, 割阶运动时会在其运动轨迹上留下一系列空位, 空位浓度的增加为刃位错的攀移创造了有利的条件. 当lnZ≤37.4 (420 ℃, 10 s-1 )时, 如图5a所示, 合金组织为典型的多边形化亚晶组织, 表明该条件下位错的攀移运动是控制变形的主要机制. 由于位错攀移过程中的热激活区仅为一个Burgers矢量大小, 因而对表观激活体积的贡献较小. 当lnZ=32.8 (420 ℃, 0.1 s-1 )时, 如图5b所示, 亚晶内存在大量的位错壁, 表明位错攀移运动较为活跃. 局部亚晶界由一定宽度且排列规整的位错网络组成. 研究[25 ] 表明, 位错网络相当于扭转型亚晶界, 是由位错缠结中的螺位错经过调整而重新组合而成, 说明该变形条件下位错的交滑移和攀移是控制变形的主要机制. 此外, 还注意到在基体中分布着细小的β ′(Al3 Zr)相粒子, Al3 Zr粒子的存在增大了位错塞积和交截的机会, 使合金中亚晶数量增多的同时能够有效地抑制动态再结晶的发生. 当lnZ=30.9 (460 ℃, 0.1 s-1 )时, 如图5c所示, 亚晶内的位错被溶质原子以及细微粒子所钉扎. DSC测试结果[26 ] 表明, S相(Al2 CuMg)在310 ℃附近发生回溶, S相的回溶将增大合金中Cu和Mg原子的固溶度, 进而增大了溶质原子对位错网络或单根位错的化学拖拽力, 从而促使变形激活能和激活体积增大. 当温度超过400 ℃, δ 相(AlLi), T相(Al2 MgLi) 和少量的T2 相(Al6 CuLi3 )会发生回溶, S相的固溶度也进一步增大[26 ] , Li和Mg等溶质原子对位错的阻碍作用更为明显, 变形激活能和激活体积又一次急剧增加. 此外, 借助外力和热激活作用, 位于亚晶界上连接较为薄弱的位错网中的可动位错挣脱束缚而继续运动, 三维位错网脱缠所对应的高激活能和高激活体积对2099合金热激活参数产生一定影响. 当lnZ=24.5 (500 ℃, 0.001 s-1 )时, 如图5d所示, 合金组织呈现典型的再结晶特征, 晶界明锐平直, 有进一步长大的趋势, 说明该条件下已发生了动态再结晶, 与之相对应的热激活能也有所降低. ...
2
1996
... 图5为2099合金在不同的温度补偿应变速率下的TEM像. 在热变形过程中, 由于螺位错在交滑移时相互交截而产生大量割阶, 割阶运动时会在其运动轨迹上留下一系列空位, 空位浓度的增加为刃位错的攀移创造了有利的条件. 当lnZ≤37.4 (420 ℃, 10 s-1 )时, 如图5a所示, 合金组织为典型的多边形化亚晶组织, 表明该条件下位错的攀移运动是控制变形的主要机制. 由于位错攀移过程中的热激活区仅为一个Burgers矢量大小, 因而对表观激活体积的贡献较小. 当lnZ=32.8 (420 ℃, 0.1 s-1 )时, 如图5b所示, 亚晶内存在大量的位错壁, 表明位错攀移运动较为活跃. 局部亚晶界由一定宽度且排列规整的位错网络组成. 研究[25 ] 表明, 位错网络相当于扭转型亚晶界, 是由位错缠结中的螺位错经过调整而重新组合而成, 说明该变形条件下位错的交滑移和攀移是控制变形的主要机制. 此外, 还注意到在基体中分布着细小的β ′(Al3 Zr)相粒子, Al3 Zr粒子的存在增大了位错塞积和交截的机会, 使合金中亚晶数量增多的同时能够有效地抑制动态再结晶的发生. 当lnZ=30.9 (460 ℃, 0.1 s-1 )时, 如图5c所示, 亚晶内的位错被溶质原子以及细微粒子所钉扎. DSC测试结果[26 ] 表明, S相(Al2 CuMg)在310 ℃附近发生回溶, S相的回溶将增大合金中Cu和Mg原子的固溶度, 进而增大了溶质原子对位错网络或单根位错的化学拖拽力, 从而促使变形激活能和激活体积增大. 当温度超过400 ℃, δ 相(AlLi), T相(Al2 MgLi) 和少量的T2 相(Al6 CuLi3 )会发生回溶, S相的固溶度也进一步增大[26 ] , Li和Mg等溶质原子对位错的阻碍作用更为明显, 变形激活能和激活体积又一次急剧增加. 此外, 借助外力和热激活作用, 位于亚晶界上连接较为薄弱的位错网中的可动位错挣脱束缚而继续运动, 三维位错网脱缠所对应的高激活能和高激活体积对2099合金热激活参数产生一定影响. 当lnZ=24.5 (500 ℃, 0.001 s-1 )时, 如图5d所示, 合金组织呈现典型的再结晶特征, 晶界明锐平直, 有进一步长大的趋势, 说明该条件下已发生了动态再结晶, 与之相对应的热激活能也有所降低. ...
... [26 ], Li和Mg等溶质原子对位错的阻碍作用更为明显, 变形激活能和激活体积又一次急剧增加. 此外, 借助外力和热激活作用, 位于亚晶界上连接较为薄弱的位错网中的可动位错挣脱束缚而继续运动, 三维位错网脱缠所对应的高激活能和高激活体积对2099合金热激活参数产生一定影响. 当lnZ=24.5 (500 ℃, 0.001 s-1 )时, 如图5d所示, 合金组织呈现典型的再结晶特征, 晶界明锐平直, 有进一步长大的趋势, 说明该条件下已发生了动态再结晶, 与之相对应的热激活能也有所降低. ...
2
1996
... 图5为2099合金在不同的温度补偿应变速率下的TEM像. 在热变形过程中, 由于螺位错在交滑移时相互交截而产生大量割阶, 割阶运动时会在其运动轨迹上留下一系列空位, 空位浓度的增加为刃位错的攀移创造了有利的条件. 当lnZ≤37.4 (420 ℃, 10 s-1 )时, 如图5a所示, 合金组织为典型的多边形化亚晶组织, 表明该条件下位错的攀移运动是控制变形的主要机制. 由于位错攀移过程中的热激活区仅为一个Burgers矢量大小, 因而对表观激活体积的贡献较小. 当lnZ=32.8 (420 ℃, 0.1 s-1 )时, 如图5b所示, 亚晶内存在大量的位错壁, 表明位错攀移运动较为活跃. 局部亚晶界由一定宽度且排列规整的位错网络组成. 研究[25 ] 表明, 位错网络相当于扭转型亚晶界, 是由位错缠结中的螺位错经过调整而重新组合而成, 说明该变形条件下位错的交滑移和攀移是控制变形的主要机制. 此外, 还注意到在基体中分布着细小的β ′(Al3 Zr)相粒子, Al3 Zr粒子的存在增大了位错塞积和交截的机会, 使合金中亚晶数量增多的同时能够有效地抑制动态再结晶的发生. 当lnZ=30.9 (460 ℃, 0.1 s-1 )时, 如图5c所示, 亚晶内的位错被溶质原子以及细微粒子所钉扎. DSC测试结果[26 ] 表明, S相(Al2 CuMg)在310 ℃附近发生回溶, S相的回溶将增大合金中Cu和Mg原子的固溶度, 进而增大了溶质原子对位错网络或单根位错的化学拖拽力, 从而促使变形激活能和激活体积增大. 当温度超过400 ℃, δ 相(AlLi), T相(Al2 MgLi) 和少量的T2 相(Al6 CuLi3 )会发生回溶, S相的固溶度也进一步增大[26 ] , Li和Mg等溶质原子对位错的阻碍作用更为明显, 变形激活能和激活体积又一次急剧增加. 此外, 借助外力和热激活作用, 位于亚晶界上连接较为薄弱的位错网中的可动位错挣脱束缚而继续运动, 三维位错网脱缠所对应的高激活能和高激活体积对2099合金热激活参数产生一定影响. 当lnZ=24.5 (500 ℃, 0.001 s-1 )时, 如图5d所示, 合金组织呈现典型的再结晶特征, 晶界明锐平直, 有进一步长大的趋势, 说明该条件下已发生了动态再结晶, 与之相对应的热激活能也有所降低. ...
... [26 ], Li和Mg等溶质原子对位错的阻碍作用更为明显, 变形激活能和激活体积又一次急剧增加. 此外, 借助外力和热激活作用, 位于亚晶界上连接较为薄弱的位错网中的可动位错挣脱束缚而继续运动, 三维位错网脱缠所对应的高激活能和高激活体积对2099合金热激活参数产生一定影响. 当lnZ=24.5 (500 ℃, 0.001 s-1 )时, 如图5d所示, 合金组织呈现典型的再结晶特征, 晶界明锐平直, 有进一步长大的趋势, 说明该条件下已发生了动态再结晶, 与之相对应的热激活能也有所降低. ...
1
2008
... 图12为不同变形条件下2099合金组织的取向差统计分布图. 可以看出, 变形前后晶体结构的取向差比例变化非常明显, 变形前合金组织主要由大角度等轴晶构成, 变形后基体组织以亚晶结构为主. 随着应变速率的降低和变形温度的升高, 小于10°的小角度亚晶逐步向10°~15°的中等角度亚晶和大于15°的大角度晶粒转化. 当应变速率为0.1 s-1 时, 变形温度从420 ℃上升到500 ℃, 小于10°的小角度亚晶比例降低, 而10°~15°范围内的亚晶比例几乎保持不变, 说明该变形条件范围内动态再结晶形核机制以晶界弓出形核为主, 亚晶合并形核次之. 当应变速率为0.001 s-1 时, 小于10°的小角度亚晶所占比例降低, 而10°~15°范围内的亚晶比例增加. 研究[27 ] 表明, 当亚晶间取向差在10°~15°范围内时, 动态再结晶更容易通过亚晶合并形核机制发生, 表明在该变形条件范围内亚晶合并形核机制得到强化, 这与利用EBSD和TEM技术分析所得到的结果一致. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}