
刘晏宇, 毛萍莉 , 刘正, 王峰, 王志
, 刘正, 王峰, 王志
沈阳工业大学材料科学与工程学院 沈阳 110870
LIU Yanyu, MAO Pingli, LIU Zheng, WANG Feng, WANG Zhi
中图分类号: TG146.2
文章编号: 0412-1961(2018)06-0950-09
通讯作者:
收稿日期: 2017-09-22
网络出版日期: 2018-06-10
版权声明: 2018 《金属学报》编辑部 《金属学报》编辑部
基金资助:
作者简介:
作者简介 刘晏宇,男,1993年生,硕士
展开
摘要
为了便于分析镁合金在高速变形过程中的变形机制,计算了4种滑移方式(基面滑移、柱面滑移、锥面<a>滑移和锥面<c+a>滑移)和2种孪晶方式({10
关键词:
Abstract
As an important parameter, the Schmid factor has been widely applied to analyze the deformation modes in metals. In order to analyze the deformation mechanisms of magnesium alloys under high strain rate, the Schmid factors of four slip modes (basal, prismatic, pyramidal <a> and pyramidal <c+a> slips) and two twinning systems ({10
Keywords:
镁合金具有低密度、高比强度和比刚度、良好的减震和切削加工性能等优点,近年来在汽车和航空航天领域的应用日益广泛,各国学者对镁合金的研究,尤其动力学行为方面的研究日益深入[1,2,3]。镁合金为hcp结构,具有低对称性,仅有2个独立的滑移系统,难以满足Von Mises准则中均匀变形所需的5个独立滑移系的要求,因此在镁合金变形中孪晶通常扮演着非常重要的角色[4]。{10 \({\bar{1}}\)2}<10 \({\bar{1}}\)1>拉伸孪晶和{10 \({\bar{1}}\)1}<10 \({\bar{1}}\)2>压缩孪晶是镁合金中最常见的2种孪晶类型,{0002}< \({10 \bar{1} 2}\)0>基面滑移(basal slip)、{10 \({\bar{1}}\)0}<11 \({\bar{2}}\)0>柱面滑移(prismatic slip)、{10 \({\bar{1}}\)1}<11 \({\bar{2}}\)0>和{10 \({\bar{1}}\)2}<11 \({\bar{2}}\) 0>一次锥面滑移(pyramidal <a> slip)以及{ \({11 \bar{2} 2}\) < \({11 \bar{2}}\) \({\bar{3}}\) >二次锥面滑移(pyramidal <c+a> slip)是镁合金中常见的滑移系统[5]。在变形的不同阶段,究竟什么是镁合金变形的主导方式,一直是各国学者致力解决的重要问题。Schmid和Boas[6]在1924年建立了Schmid因子(SF)表达式σ =τCRSS/m (σ为屈服应力;τCRSS为临界分切应力(CRSS);m为Schmid因子),之后学者们将SF与CRSS互相结合来分析镁合金中激活的变形方式[7,8,9,10,11],即SF大的变形方式启动的可能性最大,但能启动与否,很大程度上依赖该变形方式的CRSS。人们还计算预测了镁合金中各变形方式的CRSS[12,13,14,15],其中Barnett[14]基于Taylor模型得到的公式应用比较广泛:τbasal=5 MPa,τprismatic=2.5lnZ-38 MPa,τpyramidal=2.1lnZ-32 MPa,室温下τbasal<τtwinning<τprismatic≤τpyramidal。通常,镁合金的变形方式也受外界条件(温度、应变速率及受力条件等)和内部因素(晶粒取向、晶粒大小等)的共同影响[11,16~18]。一般情况下,变形过程中CRSS对温度有一定的依赖性。基面滑移和拉伸孪晶的CRSS受温度影响较小[14],而非基面滑移和压缩孪晶的CRSS随温度升高而降低。一些学者[19,20]估算了常温下激活{10 \({\bar{1}}\)2}拉伸孪晶和{10 \({\bar{1}}\)1}压缩孪晶的CRSS,分别为40~50 MPa和76~153 MPa。SF的大小与晶粒取向和受力方向密切相关。由于镁合金中织构的存在,导致其在变形过程中呈现明显的各向异性特征,不同取向的晶粒所启动的变形方式可以根据SF的大小进行分析。
目前,用SF来分析何种变形方式启动的方法尚不完善,仅停留在理论阶段,缺乏实验数据进行验证,更鲜见将SF与高速冲击变形相结合来验证其应用的研究。本工作通过SF计算,结合电子背散射衍射(electron backscattered diffraction,EBSD)技术和镁合金微观组织观察,讨论不同受力方向样品的微观变形机制,并对这种方法进行了评估。
实验材料为厚度8 mm的AZ31镁合金(Mg-3%Al-1%Zn-0.2%Mn,质量分数)轧制板材,在350 ℃下多道次轧制而成。使用线切割方法从板材取出3个不同方向的样品,样品为直径6 mm×6 mm的棒材,分别沿板材的轧向(rolling direction,RD)、横向(transverse direction,TD)和法向(normal direction,ND)。为了方便讨论,将不同方向样品分别称作RD样品、TD样品和ND样品。
采用Hopkinson压杆(SHPB)进行高应变速率压缩变形实验,应变速率约为1600 s-1,SHPB装置通过控制气压和子弹深度来控制应变速率,利用一维应力波理论获得材料的应变速率
使用线切割方法制备AZ31镁合金轧板样品,对轧制面进行研磨、机械抛光后,使用10%高氯酸-酒精电解液进行电解抛光,利用配有HKLNordlys EBSD探头的S-3400N型扫描电镜(SEM)进行EBSD分析,使用Channel 5软件进行数据处理,获得ND方向样品的微观极图和SF图,检验SF计算结果的准确性。
式中,ϕ为外加载荷方向与滑移(或孪晶)面法向的夹角;λ为外加载荷方向与滑移(或孪晶)方向的夹角。
cosϕ (λ)的计算公式如下:
其中,V1[u1v1t1w1]为滑移面或孪晶面的法向;V2[u2v2t2w2]为载荷方向;c/a为镁合金轴比,本工作取1.624。对于滑移或孪晶系{hkil}<uvtw>,其滑移或孪晶面(hkil)的法向可用下式计算:
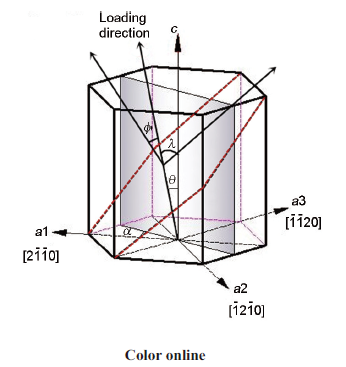
同一个单胞中,样品外加载荷方向与镁合金的晶体学方向如图1所示。图中红色虚线代表发生变形的滑移(或孪晶)面。分别用θ和α来表示外加载荷与晶粒c轴之间的夹角以及外加载荷在基面上的投影与晶粒a轴之间的夹角。θ范围为0°~90°;由于基面a轴的对称性,α取0°~30°等价于(60-α)°~60°,因此α范围为0°~30°。加载方向即为受力方向,由四指数(a1, a2, a3, c)表示,具体计算公式如下:
图1 加载方向与c轴、a轴、滑移面(或孪晶)法向和滑移(或孪晶)方向的相对关系
Fig.1 Schematic relationships of loading direction with c-axis, a-axes, normal direction of slip (or twinning) plane and slip (or twinning) direction (ϕ is the angle between the loading direction and the slip (or twinning) plane normal, λ is the angle between the loading direction and slip (or twinning) direction, θ is the angle between c-axis and the loading direction, α is the angle between a-axis and the projection of loading direction on the basal plane)
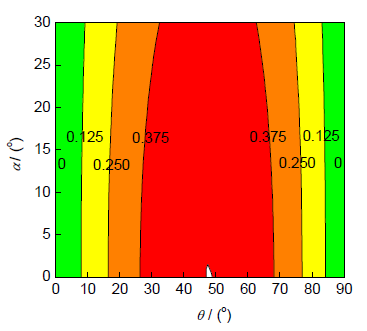
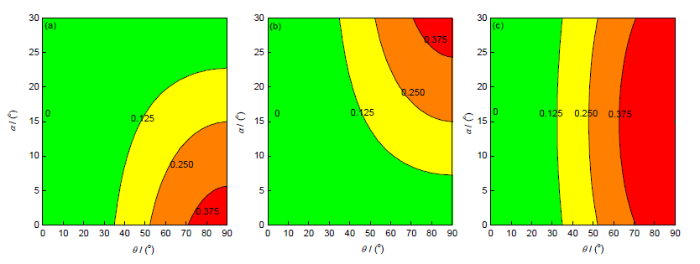
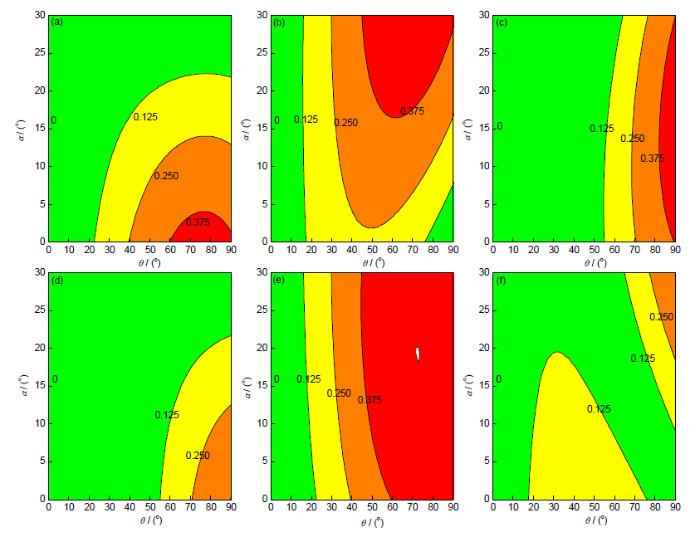
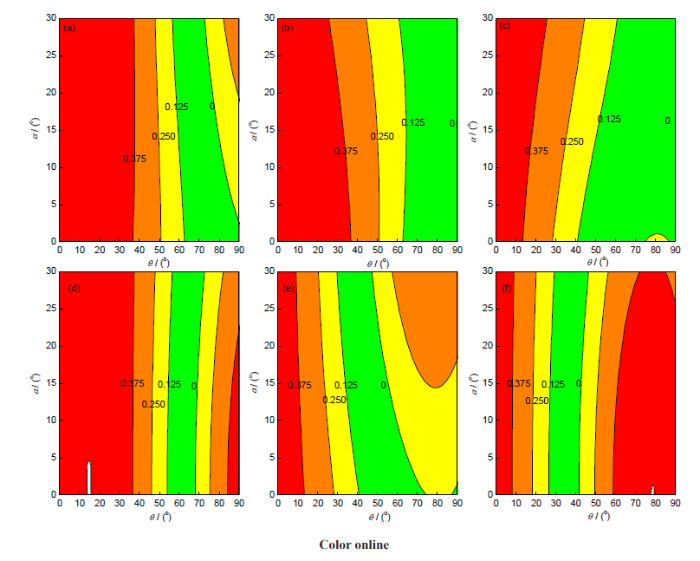
建立特定的坐标系以表示hcp结构的SF在空间的分布,不同颜色的等高线图直观地反映出滑移(或孪晶)的不同变体在不用角度区域内的SF大小。图2~5分别为基面滑移、柱面滑移、一次锥面滑移和二次锥面滑移的SF计算结果。图3中的柱面滑移包括3个滑移系,分别表示为Pr1 (10 \({\bar{1}}\)0)[ \({\bar{1}}\)2 \({\bar{1}}\)0]、Pr2 (01 \({\bar{1}}\)0)[2 \({\bar{1}}\) \({\bar{1}}\)0]、Pr3 ( \({\bar{1}}\)100)[ \({\bar{1}}\) \({\bar{1}}\)20]。图4中的锥面<a>滑移包括6个滑移系,分别表示为Py1 (10 \({\bar{1}}\)1)[ \({\bar{1}}\)2 \({\bar{1}}\)0]、Py2 (0 \({\bar{1}}\)11)[2 \({\bar{1}}\) \({\bar{1}}\)0]、Py3 ( \({\bar{1}}\)101)[ \({\bar{1}}\) \({\bar{1}}\)20]、Py4 ( \({\bar{1}}\)011)[ \({\bar{1}}\)2 \({\bar{1}}\)0]、Py5 (0 \({\bar{1}}\)11)[2 \({\bar{1}}\) \({\bar{1}}\)0]和Py6 ( \({\bar{1}}\)101)[ \({\bar{1}}\) \({\bar{1}}\)20]。图5中的锥面<c+a>滑移包括6个滑移系,分别表示为Pyr1 (11 \({\bar{2}}\)2)[ \({\bar{1}}\)\({\bar{1}}\)23]、Pyr2 (1 \({\bar{2}}\)12)[ \({\bar{1}}\)2 \({\bar{1}}\)3]、Pyr3 ( \({\bar{2}}\)2)[\({\bar{2}}\)\({\bar{1}}\) \({\bar{1}}\)213]、Pyr4 (2 \({\bar{1}}\) \({\bar{1}}\)2)[ \({\bar{2}}\)113]、Pyr5 ( \({\bar{2}}\)112)[2 \({\bar{1}}\) \({\bar{1}}\)3]和Pyr6 ( \({\bar{1}}\) \({\bar{1}}\)22)[11 \({\bar{2}}\)3]。
图3 柱面滑移的SF等高线图
Fig.3 Counter maps of SF of prismatic slip(a) Pr1 (b) Pr2 (c) Pr3
图4 锥面<a>滑移的SF等高线图
Fig.4 Counter maps of SF of pyramidal <a> slip(a) Py1 (b) Py2 (c) Py3 (d) Py4 (e) Py5 (f) Py6
图5 锥面<c+a>滑移的SF等高线图
Fig.5 Counter maps of SF of pyramidal <c+a> slip
Pyr1 (b) Pyr2 (c) Pyr3 (d) Pyr4 (e) Pyr5 (f) Pyr6
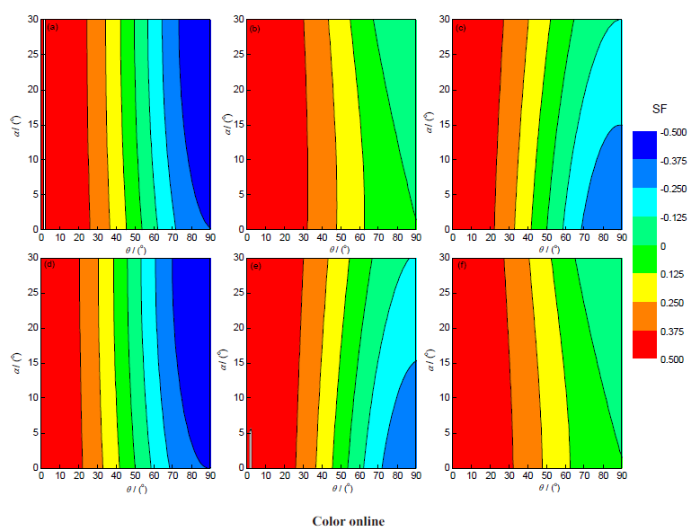
图6 {1012}拉伸孪晶的SF等高线图
Fig.6 Counter maps of SF of {1012} tension twinning
(a) ET1 (b) ET2 (c) ET3 (d) ET4 (e) ET5 (f) ET6
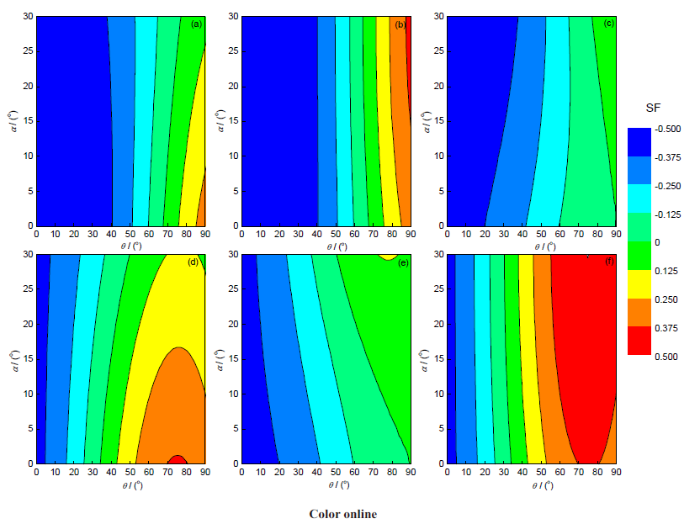
与滑移机制不同,孪生是一种有极性的变形机制。由于孪晶只能容纳单方向的分切应力,因此孪生机制中SF可能为负值,这表明孪晶能否启动与受力方向有密切关系。{10 \({\bar{1}}\)2}拉伸孪晶(tension twinning)具有6个孪晶变体,分别表示为ET1 ( \({\bar{1}}\)012)[10 \({\bar{1}}\)1]、ET2 (0 \({\bar{1}}\)12)[01 \({\bar{1}}\)1]、ET3 (1 \({\bar{1}}\)02)[ \({\bar{1}}\)101]、ET4 (10 \({\bar{1}}\)2)[ \({\bar{1}}\)011]、ET5 (01 \({\bar{1}}\)2)[0 \({\bar{1}}\)11]和ET6 ( \({\bar{1}}\)102)[1 \({\bar{1}}\)01];{10 \({\bar{1}}\)1}压缩孪晶(contraction twinning)的6个变体分别表示为:CT1 (1 \({\bar{1}}\)01)[1 \({\bar{1}}\)0 \({\bar{2}}\)]、CT2 (10 \({\bar{1}}\)1)[10 \({\bar{1}}\)\({\bar{2}}\)]、CT3 (01 \({\bar{1}}\)1)[01 \({\bar{1}}\)\({\bar{2}}\)]、CT4 ( \({\bar{1}}\)101)[ \({\bar{1}}\)10 \({\bar{1}}\)]、CT5 ( \({\bar{1}}\)011)[ \({\bar{1}}\)01 \({\bar{1}}\)]和CT6 (0 \({\bar{1}}\)11)[0 \({\bar{1}}\)1 \({\bar{1}}\)];图6和7分别为{10 \({\bar{2}}\)2}拉伸孪晶和{10 \({\bar{1}}\)1}压缩孪晶的SF分布图。
从各种滑移系及孪晶系的所有变体中,可以统计出在不同加载方向下的最大SF,如表1所示。结合图2~5的SF分布图和表1可知:(1) 基面滑移的SF,先随θ增大而增大,后随θ增大而减小,最大值在θ=47°处,这表明无论外加载荷垂直或平行于c轴(θ=0°或θ=90°),基面滑移都不易发生;(2) 柱面滑移的SF,随θ增大而持续增大,当θ=90°时,SF达到最大值0.499,这表明外加载荷垂直于c轴时柱面滑移最易启动;(3) 锥面<a>滑移的SF,随θ增大而增大,最大值不在θ=90°,而在θ=70° (0.498)。θ在70°~90°时,SF一直保持较大的值,这表明外加载荷与c轴呈较大角度时锥面<a>滑移较易启动;(4) 锥面<c+a>滑移的SF在θ=15°或θ=80°时达到最大值0.499,在θ=40°或θ=50°左右时,各个滑移系的SF值普遍较小。表明锥面<c+a>滑移在θ=40°或θ=50°左右时不易启动,而在加载方向与c轴夹角小于或大于这2个角度时易启动;(5) 孪晶是一种有极性的变形机制,SF有正有负,这表明孪晶的激活与受力方向有密切关系。假设θ=0°时加载力为拉应力,即c轴受到拉应力时,拉伸孪晶SF为0.499极易激活,而在θ=90°时的拉应力,相当于c轴受到间接的压缩,拉伸孪晶为-0.499,不能激活。压缩孪晶在θ=0°受力时,SF为负值,压缩孪晶不能激活,而在θ=90°受拉应力时,SF则为正值。若加载力为压应力时,情况正好相反。压缩孪晶在θ=80°时SF达到最大值;(6) 通过不同变体SF的计算与比较,可以确定在某一受力方向时,究竟哪一变体更易激活。
表1 各变形方式在不同受力方向的最大SF
Table 1 The maximum SF for basal slip, prismatic slip, pyramidal <a> slip, pyramidal <c+a> slip and twinning at different load directions
| θ / (°) | Basal <a> | Prismatic slip | Pyramidal | Pyramidal | {1012} | {1011} |
|---|---|---|---|---|---|---|
| slip | <a> slip | <c+a> slip | twinning | twinning | ||
| 0 | 0 | 0 | 0 | 0.446 | 0.499* | - |
| 15 | 0.218 | 0.025 | 0.110 | 0.499* | 0.475 | - |
| 47 | 0.499* | 0.238 | 0.390 | 0.292 | 0.260 | 0.259 |
| 70 | 0.354 | 0.425 | 0.498* | 0.474 | 0.073 | 0.490 |
| 80 | 0.201 | 0.478 | 0.490 | 0.499* | 0.021 | 0.492* |
| 90 | 0 | 0.499* | 0.441 | 0.446 | - | 0.470 |
图7 {1011}压缩孪晶的SF等高线图
Fig.7 Counter maps of SF of {1011} contraction twinning(a) CT1 (b) CT2 (c) CT3 (d) CT4 (e) CT5 (f) CT6
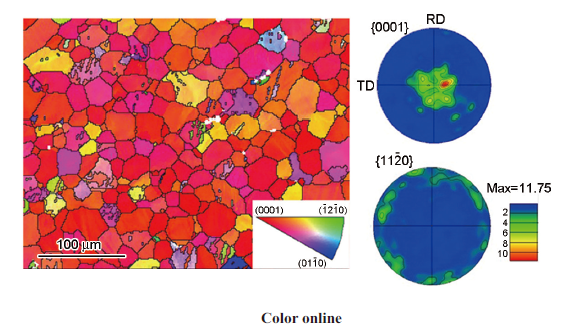
利用EBSD技术可以得到指定晶粒的SF,这些值可以分析晶粒取向对变形行为的影响。图8为AZ31镁合金轧板ND方向样品的初始显微组织和微观极图。由图可知,检测样品的绝大部分晶粒的c轴平行于轧板法向,与板材TD方向夹角约10°,晶粒基面与轧板板面平行,为典型的AZ31热轧板材{0002}织构。Channel 5软件可根据晶粒取向以及确定的加载方向,计算出视野范围内每个晶粒的SF,并按照选定的图例方式表示出来,确定单个晶粒中某种变形方式的SF,据此可进行该晶粒的变形方式分析。
图8 AZ31镁合金轧板ND方向样品的显微组织和微观极图
Fig.8 Initial microstructure and corresponding micro pole figures in the normal direction (ND) of AZ31 rolling sheet (RD—rolling direction, TD—transverse direction)
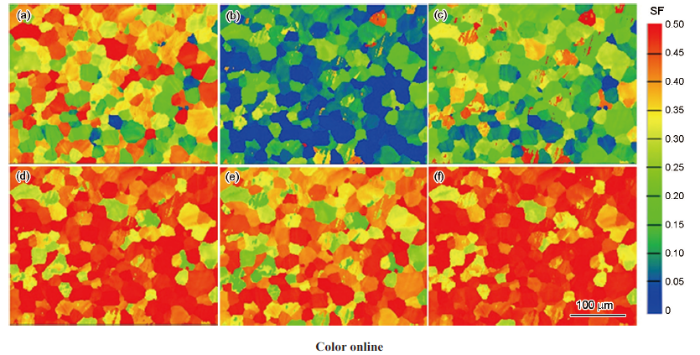
图9为试样中各种变形方式的SF图,加载方向垂直于试样表面,即平行于轧板法向。该图可以与图2~7的SF计算值很好地吻合,实验发现在实际样品中不是每一个晶粒c轴都平行于法向,只是大部分晶粒c轴大致平行于轧板法向,所以,若沿法向方向加载,θ为0°或稍大于0°。由图2~4可看出,基面、柱面、锥面<a>滑移在θ为0°附近时的SF值偏小,大部分呈现绿色或浅黄色,与图9中的实验值比较吻合;而图5中锥面<c+a>滑移的SF较大,大部分呈现深黄色或红色,也符合图9中的锥面<c+a>滑移实验值。孪晶在镁合金变形中有非常重要的作用,孪晶的启动具有方向性:{10 \({\bar{1}}\)2}拉伸孪晶在晶粒c轴受拉应力或垂直于c轴受压应力的情况下容易启动;{10 \({\bar{1}}\)1}压缩孪晶则正相反,在晶粒c轴受压应力或垂直于c轴受拉应力的情况下易启动[24,25,26,27],所以当θ=0°或θ=90°时,孪晶都有较大的启动趋势,区别仅在于所受加载力为拉应力还是压应力。用Channel 5计算的SF值没有负值,这表明图6和7中孪晶的SF值为绝对值,故得到图9中普遍偏红的孪晶SF图。
图9 镁合金各变形方式的SF图
Fig.9 SF maps of basal slip (a), prismatic slip (b), pyramidal <a> slip (c), pyramidal <c+a> slip (d), {10\({\bar{1}}\)2} tension twinning (e) and {10\({\bar{1}}\)1} contraction twinning (f)
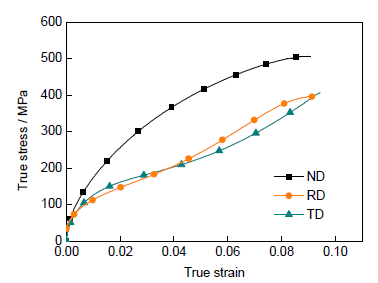
图10所示为高应变速率变形后得到的不同方向样品的应力-应变曲线。其中,RD和TD样品应力-应变曲线表现为“S”型,这是{10 \({\bar{1}}\)2}拉伸孪晶主导变形的曲线的明显特征[28,29];而ND样品应力-应变曲线则表现为传统的“上凹”形状。由图可以看出,ND样品在变形过程中的整体应力值要高于RD和TD样品。
图10 不同方向AZ31镁合金轧板样品在1600 s-1应变速率的应力-应变曲线
Fig.10 True stress-true strain curves of different AZ31 Mg alloys rolling sheet samples with different directions at the strain rate of 1600 s-1
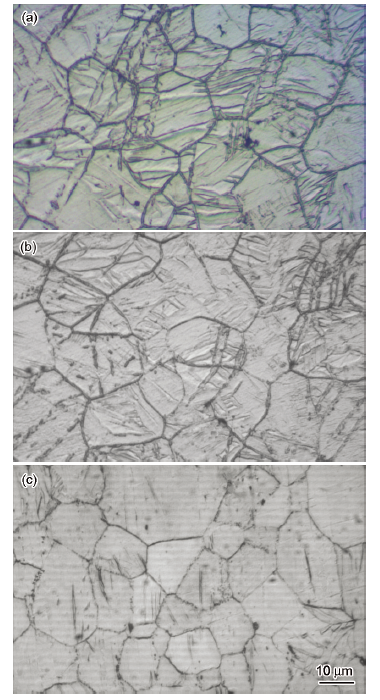
假设样品具有理想的完整织构,假定每个样品仅包含一个晶粒,当加载方向垂直于试样表面时,RD样品和TD样品受垂直于c轴的压缩应力,相当于SF计算中的θ=90°,而ND样品受平行于c轴的压缩应力,相当于SF计算中的θ=0°。图11为不同方向样品在应变量为0.05时的显微组织,对于TD和RD样品,受到与c轴垂直方向的压应力,{10 \({\bar{1}}\)2}拉伸孪晶的SF应对应图6中θ=90°时SF的绝对值,SF的最大值为ET1和ET4的0.499。在该加载方向下,柱面、锥面<a>和锥面<c+a>滑移和{\({10 \bar{1} 1}\)}压缩孪晶的SF都较大(见表1,分别为0.499、0.441、0.446和0.470)。孪晶的启动具有方向性,这时相当于平行c轴方向受到拉应力,因此{\({10 \bar{1} 1}\)}压缩孪晶不能启动,而激活{\({10 \bar{1} 2}\)}拉伸孪晶所需的CRSS又远小于上述3种滑移变形方式的CRSS。所以拉伸孪晶在RD和TD样品的前期变形中占主导地位,组织观察结果也证实了这一结论,在图11a和b中,几乎每个晶粒中都形成了孪晶。随着孪晶不断形成,晶粒发生旋转,同时孪晶容纳应变能力大幅下降,所以变形中后期滑移开始启动。由于孪晶与滑移交互作用使样品加工硬化率上升,应力-应变曲线呈现“S”型特征;对于ND样品,相当于压应力平行于c轴,即θ=0°,这时{10 \({\bar{1}}\)1}压缩孪晶的SF大致为图7中θ=0°时SF的绝对值0.415,基面、柱面、锥面<a>滑移的SF都为0,锥面<c+a>滑移和{\({10 \bar{1} 2}\)}拉伸孪晶的SF较大,分别为0.446和0.499。同理,由于平行c轴方向受压应力,{\({10 \bar{1} 2}\)}拉伸孪晶不能启动,所以启动的变形机制主要为锥面<c+a>滑移和{\({10 \bar{1} 1}\)}压缩孪晶。由于常温下激活{\({10 \bar{1} 1}\)}压缩孪晶的临界分切应力非常大,{\({10 \bar{1} 1}\)}压缩孪晶容纳应变能力有限,不能容纳所有塑性变形,所以ND样品的主要变形方式为锥面<c+a>滑移和一部分{\({10 \bar{1} 1}\)}压缩孪晶,以锥面<c+a>滑移为主,图11c中的组织观察结果也证实了这种分析的正确性。由于激活压缩孪晶和非基面滑移所需的CRSS大于激活拉伸孪晶的CRSS,所以ND样品应力-应变曲线的整体应力值(包括屈服应力)大于RD和TD样品。
图11 应变为0.05时,TD、RD和ND样品的显微组织
Fig.11 Microstructures of TD (a), RD (b) and ND (c) samples at the strain of 0.05
(1) 利用SF的理论计算结果分析了AZ31镁合金轧板分别沿RD、TD和ND方向的高速变形机理,分析结果与应力-应变曲线及组织观察结果相吻合。
(2) 不同变形方式的SF随加载方向与c轴的夹角(θ角)变化规律不同,最大SF对应的θ角也不同:当θ为47°时,基面滑移的SF最大;θ为90°时,柱面滑移的SF最大;当θ为70°~90°时,锥面<a>滑移的SF较大;在θ=15°或θ=80°时,锥面<c+a>滑移的SF最大;孪晶的SF在θ=0°或θ=90°时达到最大值,但孪晶的启动与否取决于所受加载力是拉应力还是压应力。拉伸孪晶在c轴受拉或垂直于c轴受压时易启动,压缩孪晶则相反,当c轴受压或垂直于c轴受拉时易启动。
The authors have declared that no competing interests exist.

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}