
张金虎 , 王云志
, 王云志
ZHANG Jinhu, WANG Yunzhi
中图分类号: TG111.5
文献标识码: A
文章编号: 0412-1961(2016)08-0905-10
通讯作者:
收稿日期: 2016-02-2
网络出版日期: 2016-08-31
版权声明: 2016 《金属学报》编辑部 《金属学报》编辑部
基金资助:
作者简介:
作者简介: 张金虎, 男, 1984年生, 博士生
展开
摘要
借助Willis-Steeds-Lothe方法计算了单根长直刃型与螺型位错应力场, 并采用相场动力学方法模拟了含位错Ti-6Al-4V合金中β→α转变过程, 探索长直位错应力场下共格α相的形核及对微织构形成的影响. 研究表明, 刃型位错应力场与择优α变体间相互作用能中, 正应力分量S33起主要作用; 螺型位错时切应力分量S23作用最大. 刃型位错应力场对α变体选择的作用要强于螺型位错. 刃型位错下择优变体以V1与V7为主, 螺型位错时以变体V7, V10及V12为主, 且V1/V7, V1/V4/V6是刃型位错下主要出现的变体组合类型, 而螺型位错时则以V7/V10/V12组合为主. 含位错体系的微观组织由位错应力场与α变体之间相互作用能, 以及α变体之间弹性相互作用能共同决定. 位错周围的应力场可导致界面能较高的界面类型出现.
关键词:
Abstract
Titanium alloys are widely applied in aerospace, chemical and other related industries. The α+β alloys may obtain various microstructures and mechanical properties simply by varying their thermomechanical processing. Ti-6Al-4V alloy is the most common α+β titanium alloy. Its strength, ductility, fracture toughness and fatigue properties depend strongly on the microstructure especially texture. The understanding of the formation mechanisms of α micro-texture during processing is necessary for the optimization of the mechanical properties. In this work, the nucleation of α precipitates and micro-texture formation process under the influence of dislocations during the β→α transformation in Ti-6Al-4V alloy was simulated by phase field method. The stress field of an infinite straight dislocation was calculated by Willis-Steeds-Lothe method and used as input of the phase field model. It was shown that the normal stress component S33 plays a dominant role in α variants nucleation in the presence of edge dislocation, while the shear stress component S23 is the most important one for screw dislocation. The effect of edge dislocation on α variant selection is generally stronger than that of screw. V1 and V7 are the main variants selected by the edge dislocation while V7, V10 and V12 dominate around the screw dislocation, with V1/V7, V1/V4/V6 being the main variant cluster types around the edge dislocation, and V7/V10/V12 being the primary one for the screw dislocation. In a system with the presence of dislocations in the parent phase, the precipitate microstructure is determined by the combined effect of elastic interactions between the dislocation and different variants of a low symmetry precipitate phase, and elastic interactions among different variants. Variants with interfaces of relatively high energy may appear because of variants selection by dislocations.
Keywords:
钛合金由于具有多层次的复杂微观组织而具有优异的力学性能, 其多种多样的组织主要来源于其形变与相变耦合的不同热加工过程, 特别是不同条件下的β→α相变, 决定了许多钛合金的组织及性能. 高温变形等条件下β→α相变过程中发生α相的12种变体以不同几率出现的现象称变体选择, 即某几种变体的出现频次高于其余变体, 进而导致相变微织构的形成. β相中预先存在的位错[1~3]和晶界[4~6]等缺陷, 以及热机械加工过程中外加应力及残余应力等[7~9]均可引起变体选择, 特别是由此造成强烈的相变织构可能会引起“宏区”[10,11], 其出现会大幅度降低合金的疲劳及蠕变性能[12,13].
Ti-6Al-4V (Ti64)合金作为最常见的α+β钛合金, 在其β相区的预变形对随后冷却时发生的β→α转变过程中变体选择行为具有非常重要的影响, 该影响可能与β晶粒中的位错构型密切相关. 例如, Gey等[2]发现, Ti64合金中热变形过程可使得
采用由Yin等[18]提出的在各向异性弹性介质中表达位错应力场的数值方法, 分别计算单根长直刃型与螺型位错的应力场. 根据Yin等[18]对不同方法的计算时间与相对误差的比较, 考虑计算效率与精确性, 本工作中借助Willis-Steeds-Lothe方法计算单根无限长位错应力场分布. 这里, 假设α变体的弹性常数张量与β基体的弹性常数张量相同, 且β相中的弹性常数采用C11=97.7 GPa, C12=82.7 GPa, C44=37.5 GPa[19]. 据Furuhara等[1]的报道, 在β基体相中的塑性变形发生在
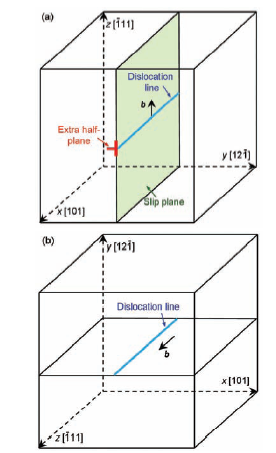
图1 含单根无限长刃型与螺型位错的相场模拟初始构型示意图
Fig.1 Schematics of simulation boxes containing an infinite straight edge (a) or screw (b) dislocation (b—Burgers vector)
考虑Ti64合金中的β→α转变过程, 模型中设置2个浓度场变量
能量
式中,
式中,
式中,
需要注意的是, 考虑到位错应力场的影响, 式(1)中须加入变体与位错之间的相互作用能项[7], 即:
式中,
式中,
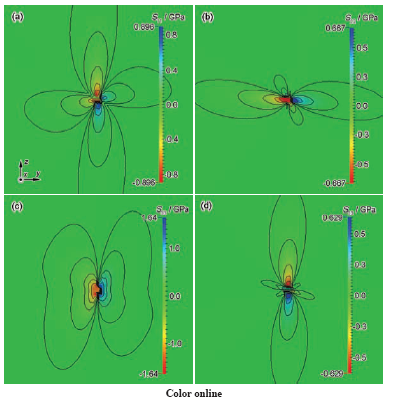
根据1.1节中提及的计算方法, 得到了单根无限长刃型位错应力场分布, 如图2所示. 与各向同性介质[32]情形下的应力场分布大体上相似, 由于考虑到基体的弹性各向异性, 应力场分布的形状对称性与各向同性介质相比有所降低, 其中2种切应力分量(即S12与S13)为零. 不难看出, 正应力分量(包括S11, S22以及S33)极值要高于切应力分量(S23)极值. 因此, 从位错应力场各应力分量极值角度分析, 刃型位错应力场中正应力占据主导地位.
图2 单根无限长刃型位错应力场分布
Fig.2 Stress field around an infinite straight edge dislocation (S11, S22 and S33 are normal stress components; S23 is shear stress component) (a) S11 (b) S22 (c) S33 (d) S23
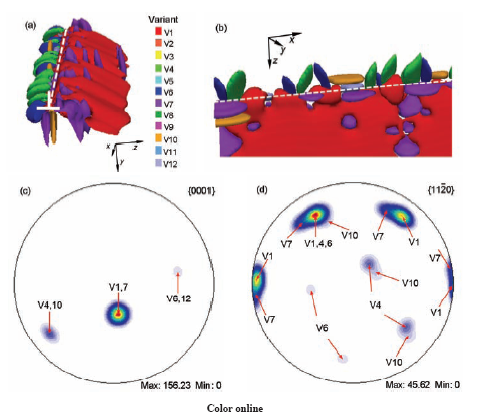
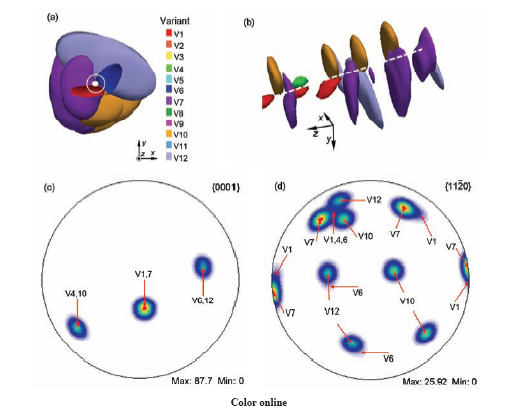
将刃型位错的应力场作为相场动力学模拟的输入, 对Ti64合金中β→α相变过程进行模拟, 所得结果见图3. 图3a与b展示了沿不同角度来观察一根刃型位错周围α相变体的析出情况, 图3b为局部放大图. 可见, 同位错的应力场分布相同, α相变体也是沿位错线析出. 与刃型位错构型相对应, 向-x方向看去变体V1出现在多余半原子面的右下侧位置, 而变体V4和V6出现在多余半原子面的左下侧, 这与Furuhara等[33]报道的结果一致. 他们采用弛豫最大失配应变的理论, 得到被择优的变体种类为V4, V8与V12 (对应本工作中的变体V1, V4与V6), 并根据纯刃型位错应力场分布给出了3种变体在位错构型中的相对位置, 这些同本工作的模拟结果完全一致. 从模拟中还可以看出, 其余出现变体则分布在滑移面沿y轴正方向一侧并靠近位错线区域. 一部分变体V7穿插在变体V1中, 不难看出, 这2种变体的体积分数相对其余变体较大, 而且它们在位错构型中的分布与刃型位错应力场分量S33的压应力区域分布趋势相符(图2与3a). 另外, Furuhara等[1,33]的报道中并没有明确解释变体V4 (对应本工作中变体V1)被优先选择的原因. 在当前相场模拟中, 变体V1为在刃型位错应力场下为最易析出的变体. 图3a中, 颜色框中12种颜色代表了12种不同取向的α相变体.
根据模拟结果中析出的各种α变体的体积分数, 借助MTEX织构分析软件得到对应α相微织构的{0001}与{1120}极图(图3c和d). 可以看出, 与变体V1和V7取向相对应的织构斑点最强, 其余取向变体的织构斑点较弱.
图3 τ=104时沿刃型位错线生长的α变体形貌及对应α相微织构的{0001}与{1120}极图
Fig.3 Morphology (a) and enlarged image (b) of α variants along edge dislocation line at τ=104 (τ is reduced time), and {0001} (c) and {1120} (d) pole figures of α micro-texture
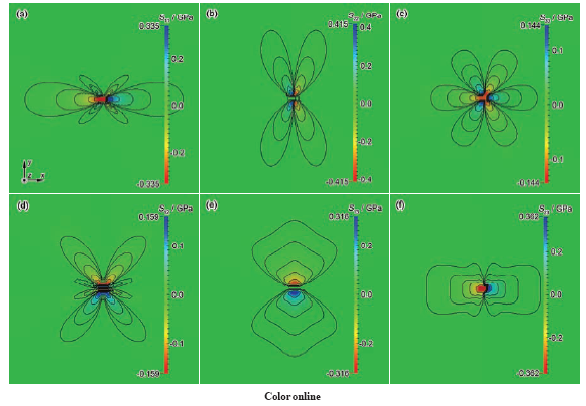
采用Willis-Steeds-Lothe方法[18]计算的单根无限长螺型位错的应力场如图4所示. 与各向同性介质[32]条件下结果明显不同的是, 此处螺型位错下正应力并不为零, 其中S22分量极值较大; 且切应力分量S12也不为零, S13与S23极值比S12大. 比较各应力分量极值可见, 与刃位错应力场相比, 螺位错周围同时存在正应力与切应力分布. 图4中螺位错应力场的分布与考虑了弹性各向异性的α-Fe中螺型位错应力场分布[34]接近.
图4 单根无限长螺型位错应力场分布
Fig.4 Stress field around an infinite straight screw dislocation (S12 and S13 are shear stress components) (a) S11 (b) S22 (c) S33 (d) S12 (e) S13 (f) S23
上一节对β→α相变过程相场模拟时考虑到了刃型位错应力场, 本节引入螺型位错的应力场后, 进行β→α相变过程的相场模拟, 在约化时间τ=104时得到结果如图5所示. 可见, 在螺型位错周围α相变体形核时, 择优析出的变体是沿着近乎垂直于螺型位错位错线方向形核并生长. 相比于刃型位错情况, 该条件下更倾向于近乎“平行”排列的V7/V10/V12变体组合(这3种变体惯习面间夹角约为8°)析出为主. Furuhara等[33]在实验中也观察到近螺型位错应力场周围择优变体V4, V8以及V12 (对应本工作中变体V1, V4及V6)的分布. 由于其采用的弛豫最大失配应变的理论所限, 忽略了择优变体也可以是V7, V10及V12的可能性. 从实验[35]与微弹性理论[25]均可得到, 这3种变体恰恰也可以极大地弛豫掉体系的弹性应变能. 而且这3种变体出现的区域同Furuhara等[33]工作中给出的在近螺型位错下选择变体的优先位置相一致, 如图5a所示, 变体V7分布在应力分量S23的压应力区域, 而变体V10及V12出现在S23拉应力区域.
图5c与d为相应α相微织构的{0001}与{1120}极图. 与图3结果相比, V1变体取向的织构斑点变弱, 而V10与V12变体取向的织构斑点增强, V7在2种情况中均是优先析出的变体. 对于α相{0001}极图, 在刃位错与螺位错下织构强度的最大值分别为156和88; 而{1120}极图, 在2种位错下织构强度的最大值分别为46和26, 意味着刃位错影响下的织构强度大于螺位错下的织构强度. 从前后相同投影面极图的织构强度最大值可判断, 刃型位错应力场对变体选择作用的强烈程度要高于螺型位错.
图5 τ=104时沿螺型位错线析出的α变体形貌以及对应α相微织构的{0001}和{1120}极图
Fig.5 Morphology (a) and enlarged image (b) of α variants along screw dislocation line at τ=104, and {0001} (c) and {1120} (d) pole figures of α micro-texture
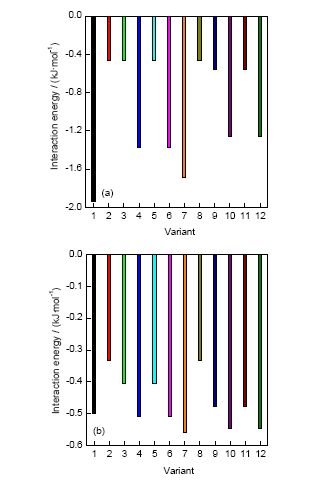
为了解释上述变体选择现象, 分析位错应力场与变体之间的相互作用能(式(6))是一种简洁快速的方法. 图6a与b分别为刃型和螺型位错与各种α变体间的相互作用能极小值. 从图6a中可见, 变体V1与V7具有最低的相互作用能极小值, 其次为变体V4, V6, V10与V12. 由图3a可见, V1和V7的体积分数最大, 而且在刃型位错线附近可以发现V1/V7, V1/V4/V6 (包含V1/V4, V1/V6, V4/V6与V1/V4/V6)及V7/V10/V12 (包含V7/V10, V7/V12, V10/V12与V7/V10/V12)等组合类型的变体“团簇”, 如图3b中所示, 并且可以注意到前2类组合类型居多. 而在图6b中, 变体V7, V10以及V12具有最低的相互作用能极小值, 在图5b中可见在螺型位错应力场中析出的变体以V7/V10/V12组合为主.
图6 不同α变体与单根无限长刃型及螺型位错间相互作用能的极小值
Fig.6 Minimum of interaction energy between different α variants and an infinite straight edge (a) or screw (b) dislocation
基于Khachaturyan和Shatalov提出的微弹性理论[23], 弹性应变能中α相变体之间不依赖于体系构型的能量项可表达为:
式中,
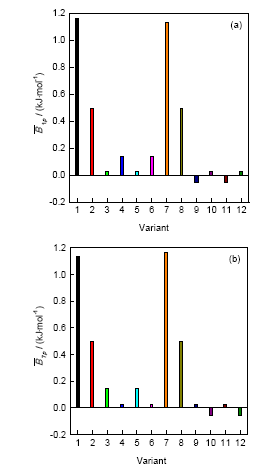
由图7b可知, 变体V7与变体V10及V12间具有最低的相互作用势能
需要注意的是, Qiu等[25]认为刃型位错与α变体的相互作用能计算结果与相应相场模拟结果一致, 而螺型位错的模拟结果并不符合, 并且给出变体V9与V11 (对应于本研究中的V9与V11)是螺型位错应力场中的主要择优变体. 本工作相互作用能计算结果在趋势及量值上均与Qiu等[25]的计算结果接近, 但螺型位错与变体的相互作用能计算与相场模拟结果一致(V7, V10与V12为主). 出现该分歧的原因可能为: (1) 螺型位错应力场与各变体的相互作用能在数值上比刃型位错小(约1/2), 即螺型位错应力场对α相变体的选择作用较弱, 其在模拟中与扰动形核的噪声项及其它能量项(界面能, 弹性应变能等)的比例关系可能不同; (2) 在相场模拟中所采用的边界条件不同, Qiu等[25]的工作采用应力控制边界条件, 而本工作中则采用应变控制边界条件. 边界条件的不同可能会导致模拟体系内局域位置上应力状态的差异, 从而导致模拟结果存在明显的差别, 类似的情况已有报道[7].
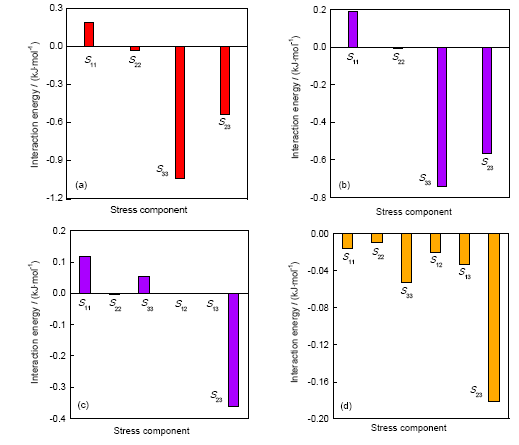
为进一步理解图6中2种位错与α相变体间的相互作用能极小值的形成, 下面将各主要择优变体所对应相互作用能的极小值分解, 分析位错应力场各应力分量对该相互作用能极小值的贡献, 如图8所示.
图7 变体V1和V7同其它变体间弹性相互作用能的平均值
Fig.7 Average values of elastic interaction energies
图8a展示了图6a中刃型位错与变体V1间相互作用能极小值中各应力分量的贡献. 可见, 正应力分量S33对刃型位错应力场与变体V1间相互作用能的贡献最大, 对形核长大的作用最为明显(图3a和b), 这与图2刃位错应力场中分量S33具有最大的应力极值相对应, 而且变体V1形核生长的位置位于应力分量S33中拉应力较大区域. 而剪切应力分量S23的贡献(对应压应力区域)为次极小, 远低于极小的贡献. 变体V1形核长大的位置恰好也位于S23为负值的应力区域. 考虑到另一分量S32与变体V1的相互作用能(与S23的贡献相同), 不难得出, 对变体V1的优先选择以应力分量S33的作用为主.
图8 刃位错和螺位错与变体的相互作用能极小值中各应力分量的贡献
Fig.8 Contributions of the major stress components to the minimum of interaction energy between edge dislocation and V1 (a) or V7 (b) in
对图6a中变体V7与刃位错的相互作用能极小值的各应力分量贡献见图8b. 可见分量S33和S23的作用为主, 与图8a中的极小值(-1.04, 即S33贡献)及次极小值(-0.53, 即S23贡献)相比, S33对应的极小值(-0.74)有所增大, 而S23对应的次极小值(-0.57)减小, 亦即正应力分量S33对应力场与变体间相互作用的贡献在减少, 切应力分量S23对该相互作用的贡献在增加. 变体V7形核生长的位置位于应力分量S33的拉应力区域及S23为负值应力区域, 如图3a和b所示.
螺型位错应力场中各应力分量分别对变体V7和V10能量极小值(图6b)的贡献见图8c和d. 注意变体V10与V12在图6b中具有相同的相互作用能, 并且各应力分量与变体V12间的相互作用能均与V10的情形相同, 故此处只列出变体V10的情况. 综上分析可知, 从应力分量对应的能量贡献考虑, 对于变体V7, V10的选择作用均以切应力分量S23的影响为主.
(1) 通过相场动力学模拟、位错与变体间相互作用能计算及α相微织构取向极图分析表明, 刃型位错应力场对α变体的选择作用强于螺型位错.
(2) 刃型位错应力场对择优α变体的能量贡献中, 正应力分量S33作用为主; 而螺型位错下, 切应力分量S23作用显著.
(3) 刃型位错应力场中, 择优变体以V1, V7为主, V1/V7, V1/V4/V6是位错线附近主要的变体组合类型; 螺型位错时以变体V7, V10及V12为主, 以V7/V10/V12组合为主要类型. V1/V4/V6与V7/V10/V12两种形式的变体组合均可极大地弛豫体系弹性应变能.
(4) 含位错体系的微观组织由位错与α变体间的相互作用能, 以及α变体之间的弹性相互作用能共同决定. 位错周围的应力场可导致界面能较高的Type6型(如V1/V7)界面的出现.
感谢中国科学院超级计算环境沈阳分中心对相场动力学模拟的支持.
The authors have declared that no competing interests exist.

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}